- Кривые линии. Комплексный чертеж поверхности

Содержание
- 2. содержание лекции кривые линии поверхности поверхности вращения способы задания поверхности на чертеже классификация поверхностей условия принадлежности
- 3. КРИВЫЕ ЛИНИИ
- 4. кривая линия множество точек пространства, координаты которых – функции одной переменной
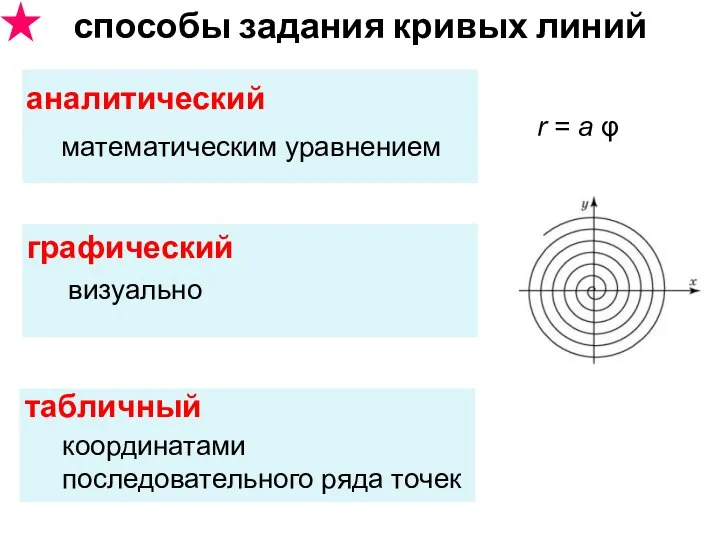
- 5. способы задания кривых линий аналитический графический табличный математическим уравнением визуально координатами последовательного ряда точек r =
- 6. (частный случай эллипса) плоские кривые линии парабола гипербола эллипс окружность синусоида все точки линии принадлежат одной
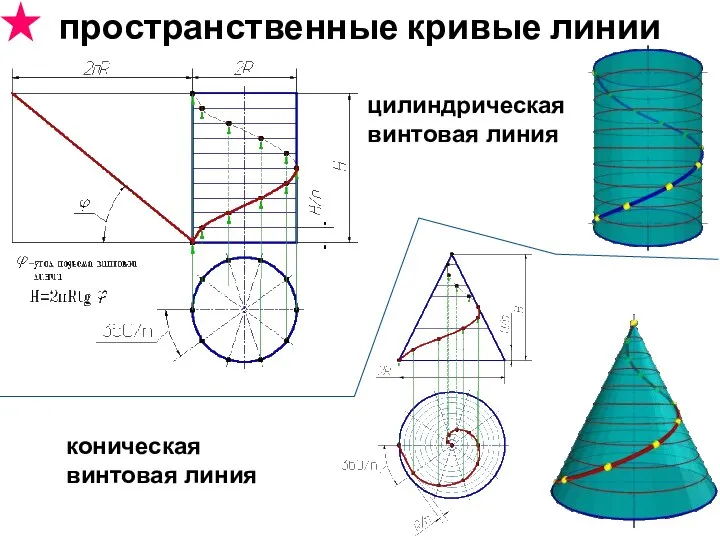
- 7. цилиндрическая винтовая линия пространственные кривые линии коническая винтовая линия
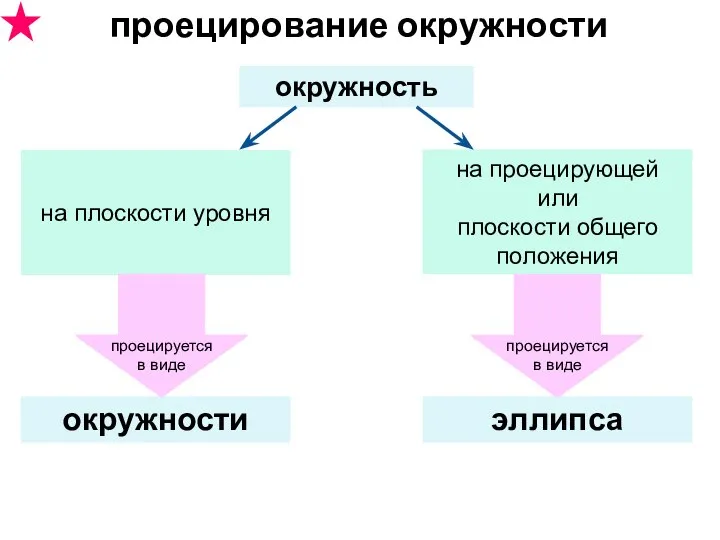
- 8. эллипса проецирование окружности окружность окружности на плоскости уровня на проецирующей или плоскости общего положения
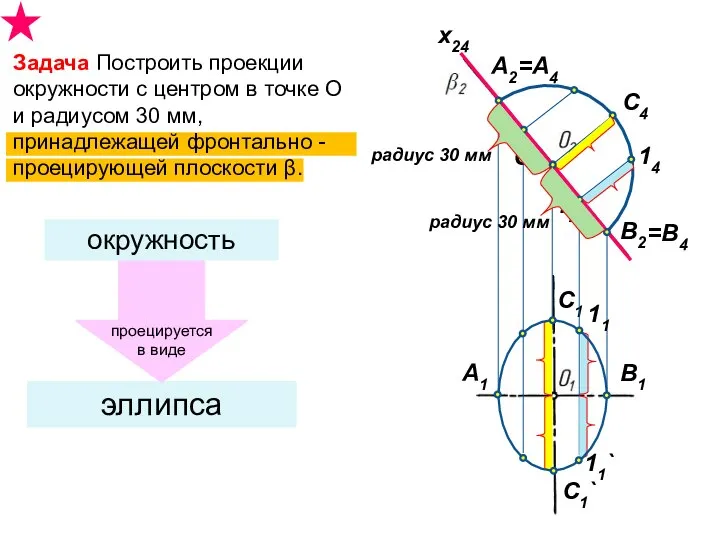
- 9. Задача Построить проекции окружности с центром в точке О и радиусом 30 мм, принадлежащей фронтально -проецирующей
- 10. ПОВЕРХНОСТИ
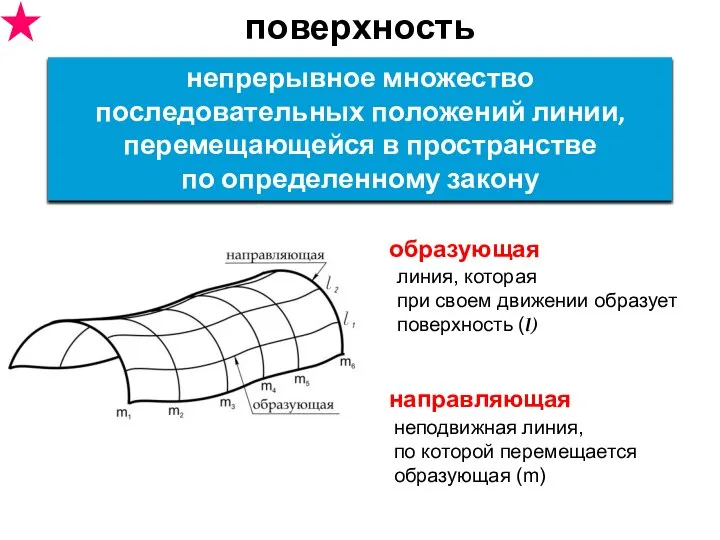
- 11. поверхность неподвижная линия, по которой перемещается образующая (m) непрерывное множество последовательных положений линии, перемещающейся в пространстве
- 12. способы задания поверхности на чертеже 1. каркас 2. определитель 3. очерк
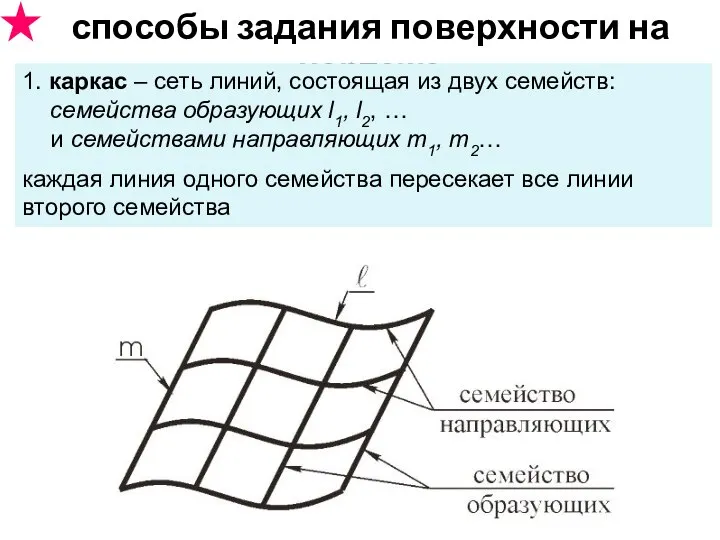
- 13. способы задания поверхности на чертеже 1. каркас – сеть линий, состоящая из двух семейств: семейства образующих
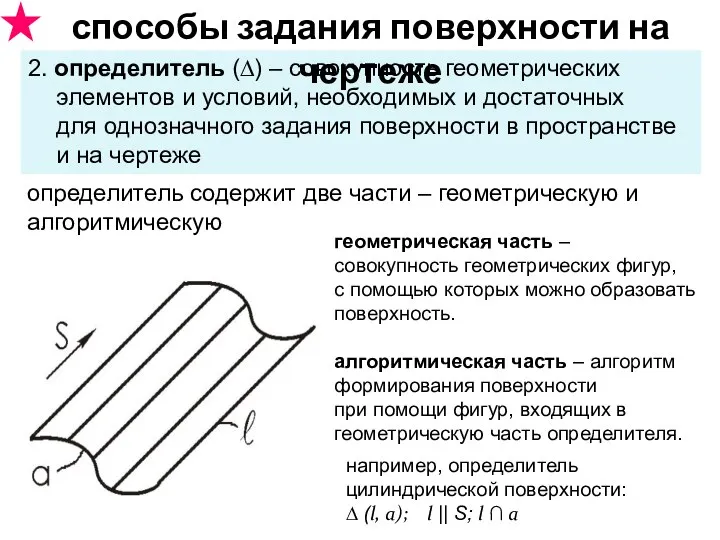
- 14. например, определитель цилиндрической поверхности: ∆ (l, а); l || S; l ∩ а 2. определитель (∆)
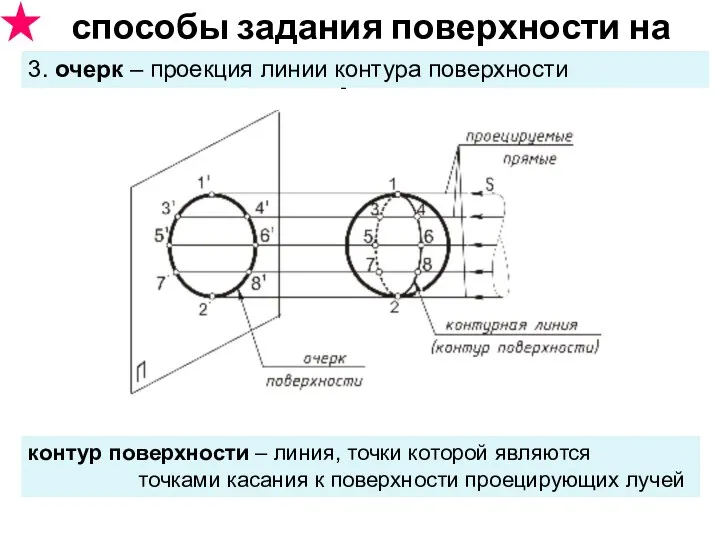
- 15. способы задания поверхности на чертеже 3. очерк – проекция линии контура поверхности контур поверхности – линия,
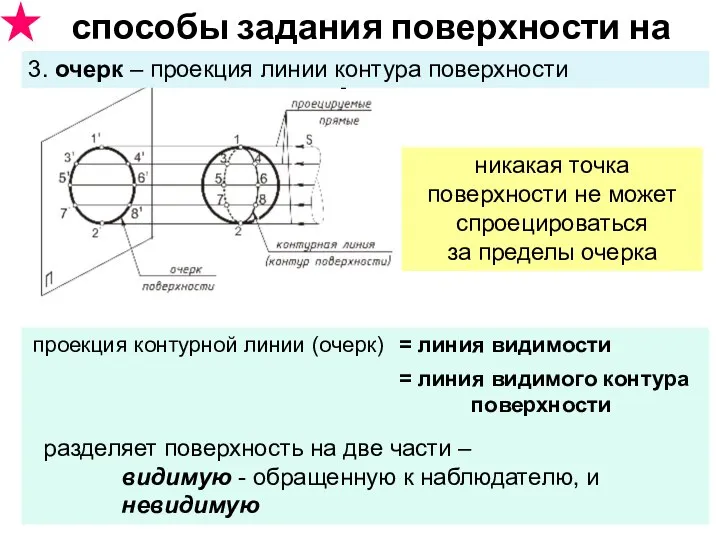
- 16. способы задания поверхности на чертеже 3. очерк – проекция линии контура поверхности никакая точка поверхности не
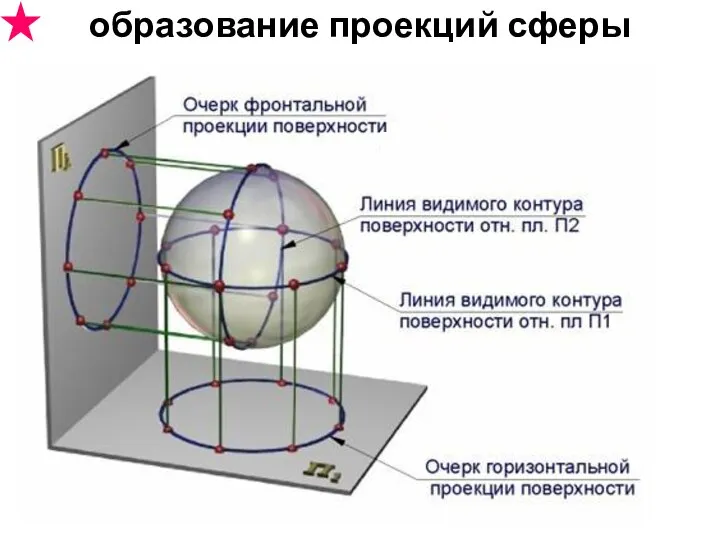
- 17. образование проекций сферы
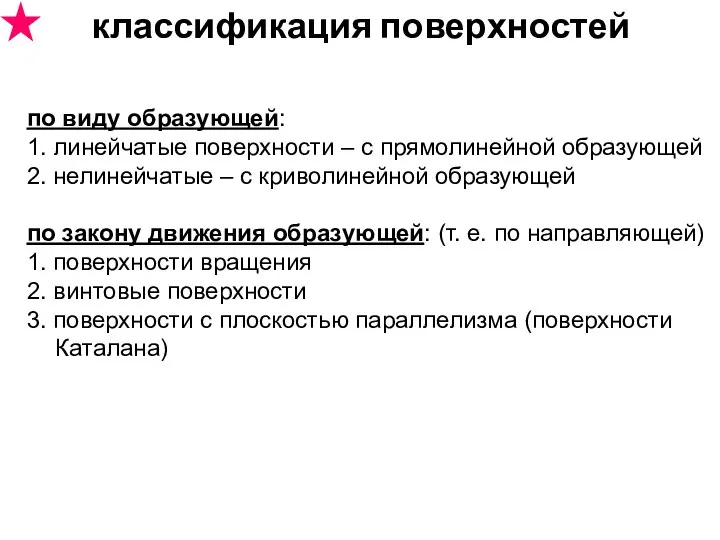
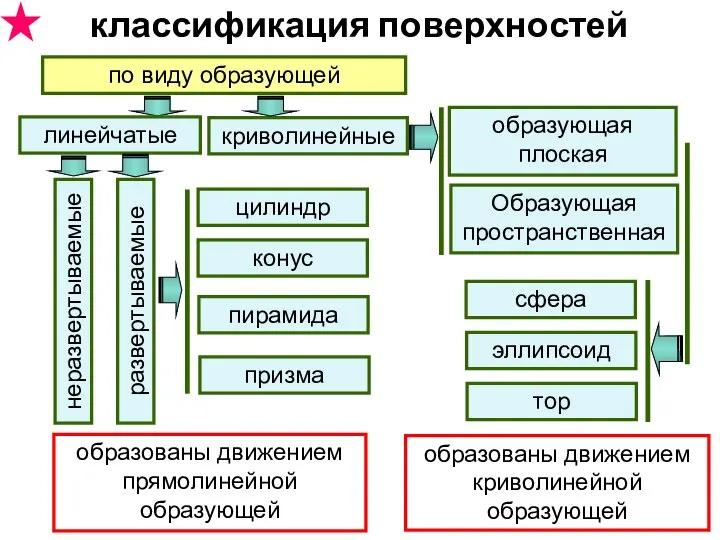
- 18. по виду образующей: 1. линейчатые поверхности – с прямолинейной образующей 2. нелинейчатые – с криволинейной образующей
- 19. по виду образующей линейчатые криволинейные развертываемые неразвертываемые цилиндр конус пирамида призма образующая плоская Образующая пространственная сфера
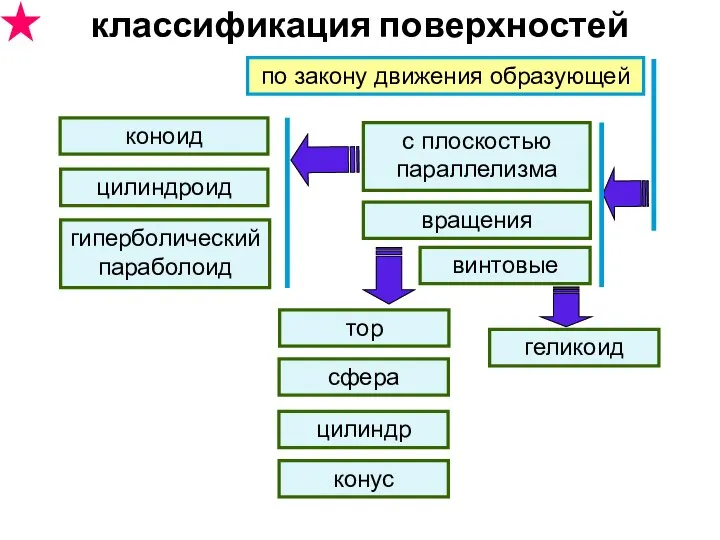
- 20. по закону движения образующей с плоскостью параллелизма вращения винтовые конус цилиндр сфера тор коноид цилиндроид гиперболический
- 21. ПОВЕРХНОСТИ ВРАЩЕНИЯ
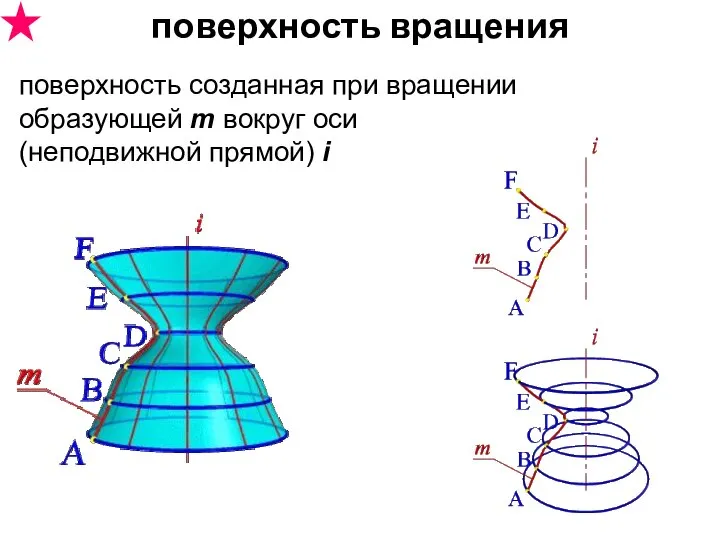
- 22. поверхность созданная при вращении образующей m вокруг оси (неподвижной прямой) i поверхность вращения
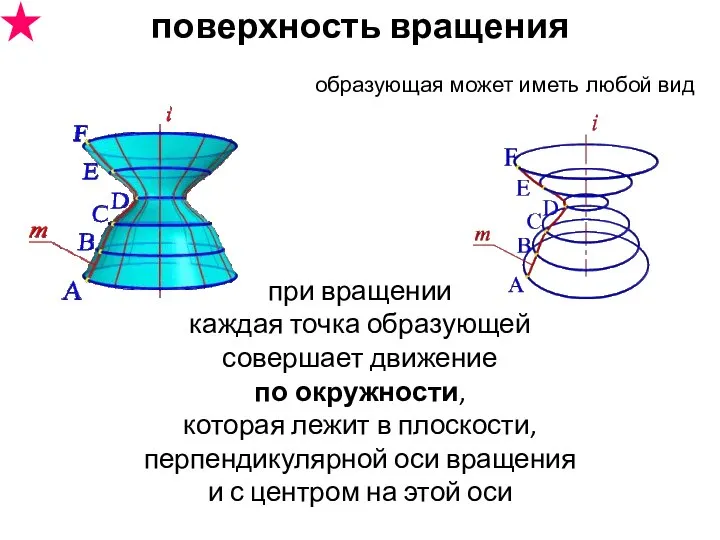
- 23. образующая может иметь любой вид при вращении каждая точка образующей совершает движение по окружности, которая лежит
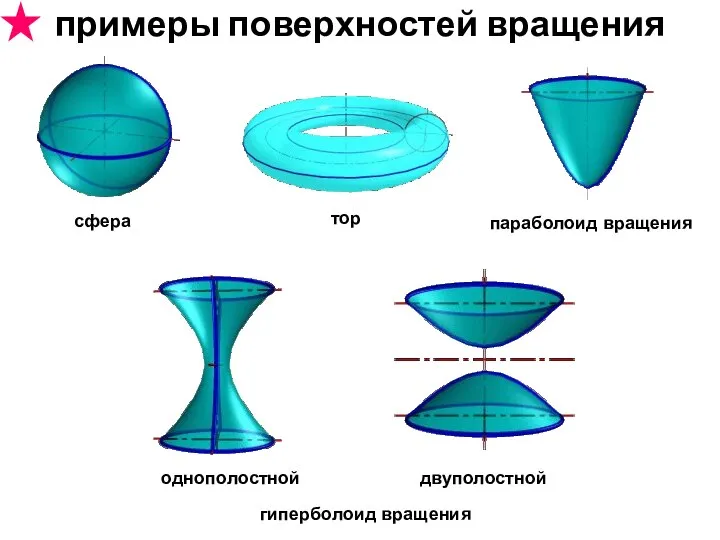
- 24. сфера тор параболоид вращения гиперболоид вращения однополостной двуполостной примеры поверхностей вращения
- 25. поверхность вращения
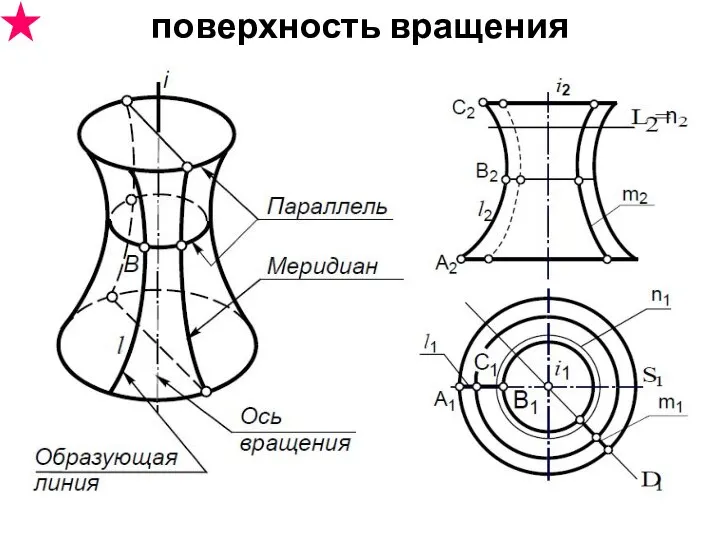
- 26. поверхность вращения меридиан линия по которой плоскость, проходящая через ось вращения, пересекает поверхность главный меридиан расположен
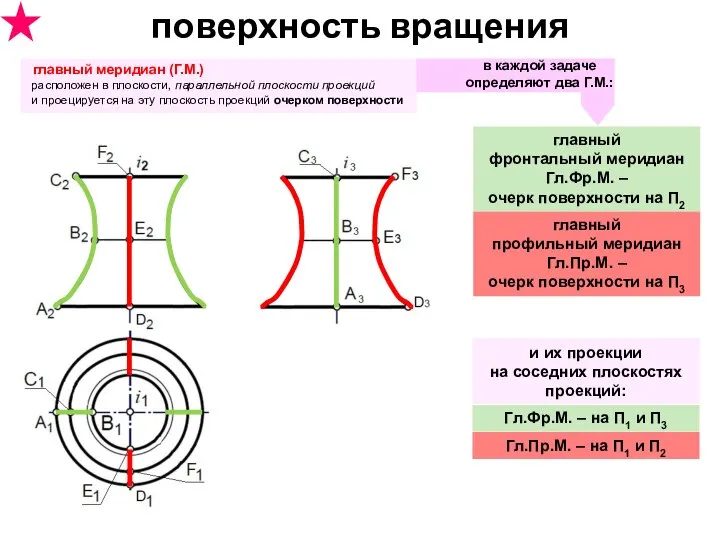
- 27. поверхность вращения главный меридиан (Г.М.) расположен в плоскости, параллельной плоскости проекций и проецируется на эту плоскость
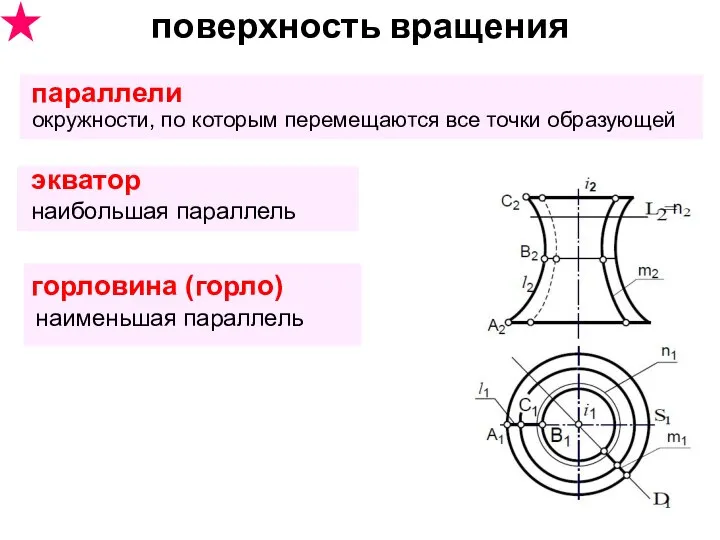
- 28. поверхность вращения параллели окружности, по которым перемещаются все точки образующей экватор наибольшая параллель горловина (горло) наименьшая
- 29. поверхность вращения на горизонтальной проекции без искажения в виде окружностей на фронтальной проекции в виде прямых
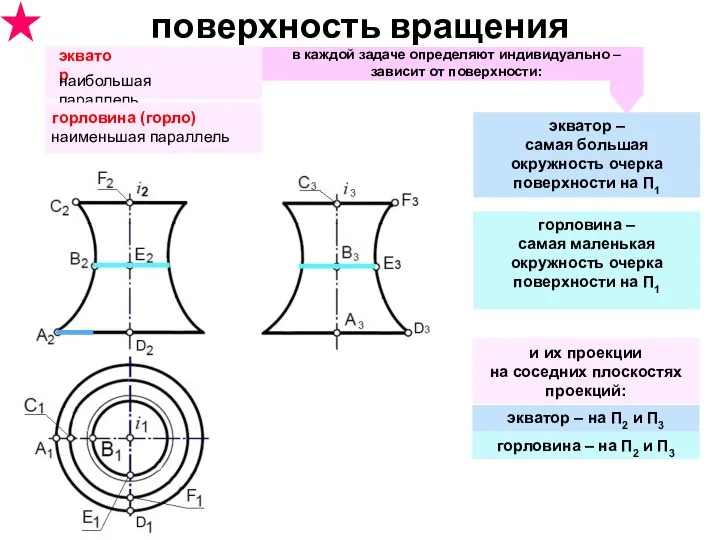
- 30. поверхность вращения горловина – самая маленькая окружность очерка поверхности на П1 экватор – самая большая окружность
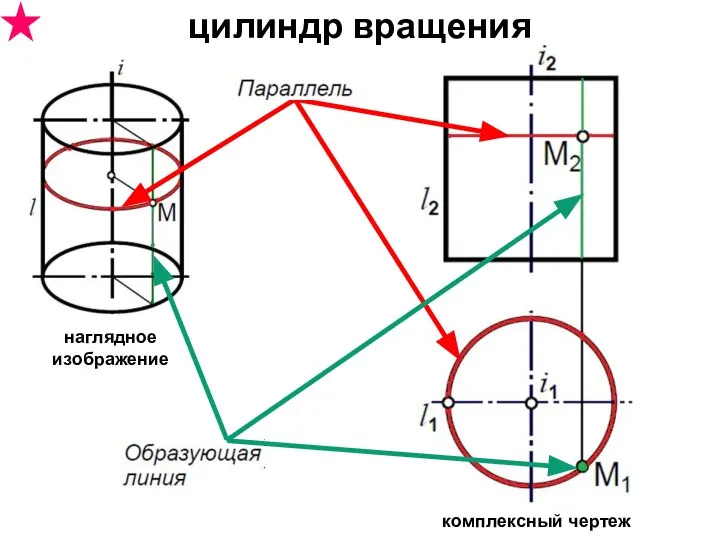
- 31. цилиндр вращения комплексный чертеж наглядное изображение
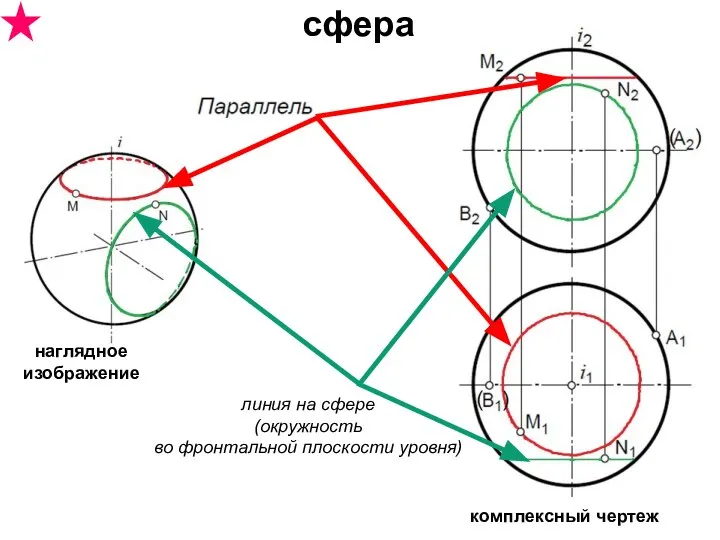
- 32. сфера комплексный чертеж наглядное изображение линия на сфере (окружность во фронтальной плоскости уровня)
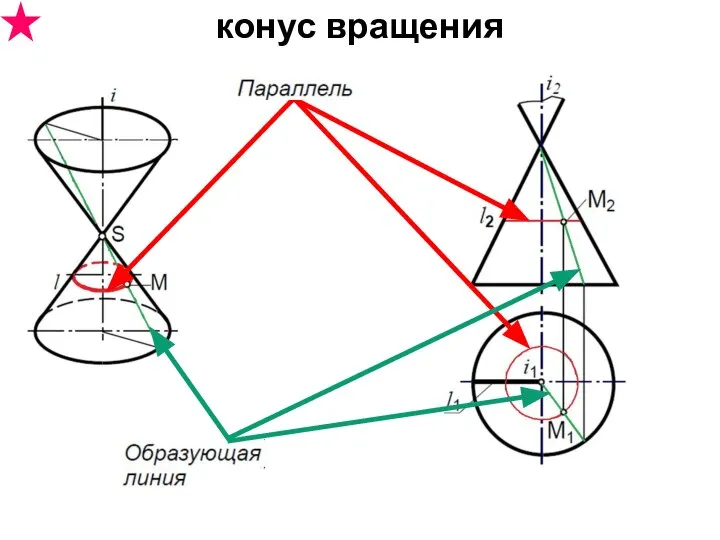
- 33. конус вращения
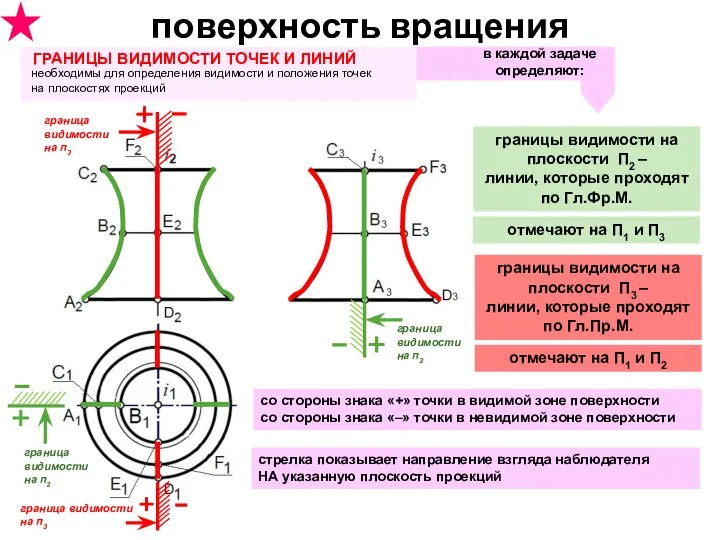
- 34. поверхность вращения ГРАНИЦЫ ВИДИМОСТИ ТОЧЕК И ЛИНИЙ необходимы для определения видимости и положения точек на плоскостях
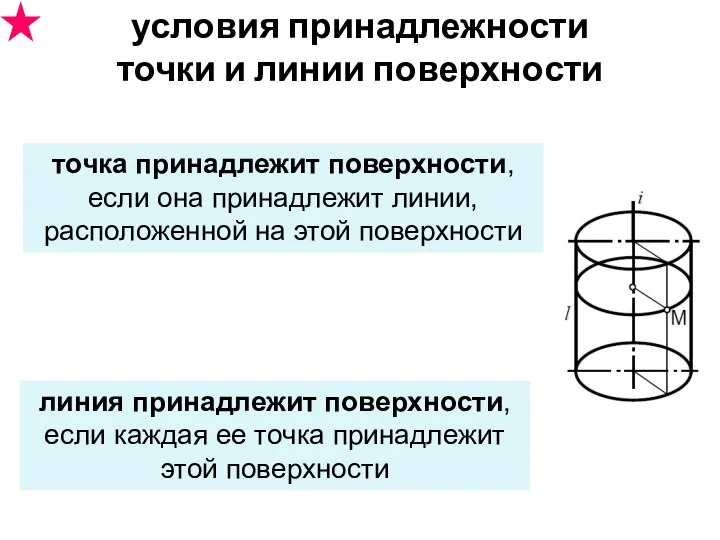
- 35. условия принадлежности точки и линии поверхности точка принадлежит поверхности, если она принадлежит линии, расположенной на этой
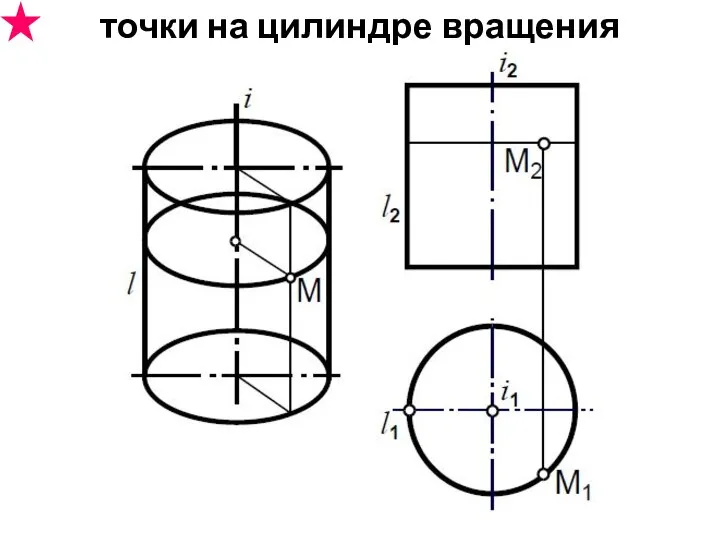
- 36. точки на цилиндре вращения
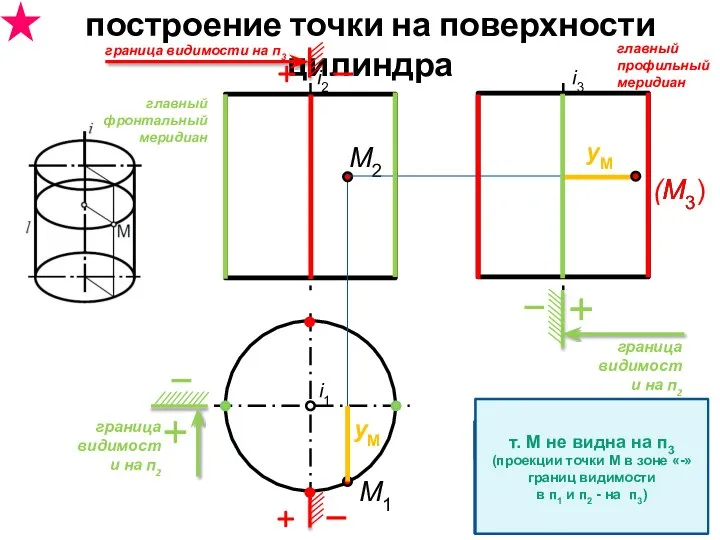
- 37. построение точки на поверхности цилиндра i1 i2 i3 M2 M1 yM yM M3 граница видимости на
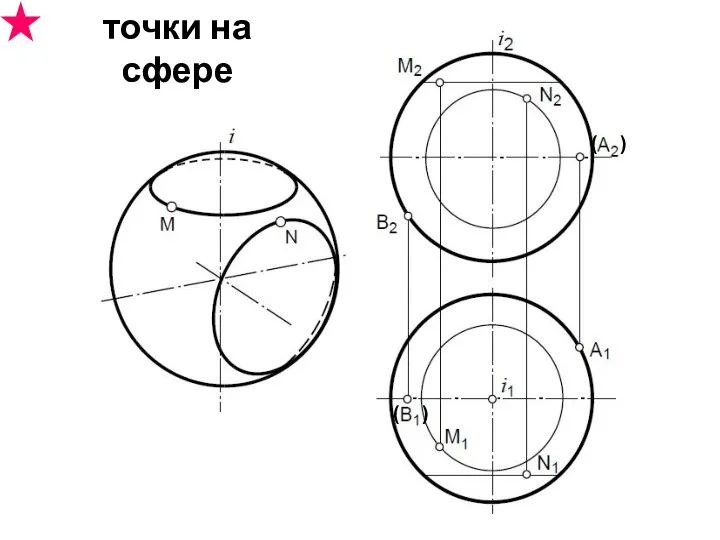
- 38. точки на сфере ( ) ( )
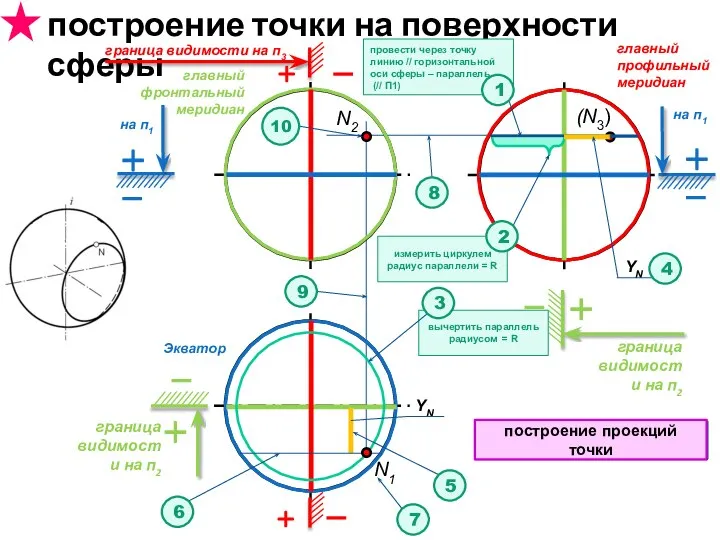
- 39. построение точки на поверхности сферы N1 граница видимости на п2 Границы видимости граница видимости на п2
- 40. точки на конусе вращения
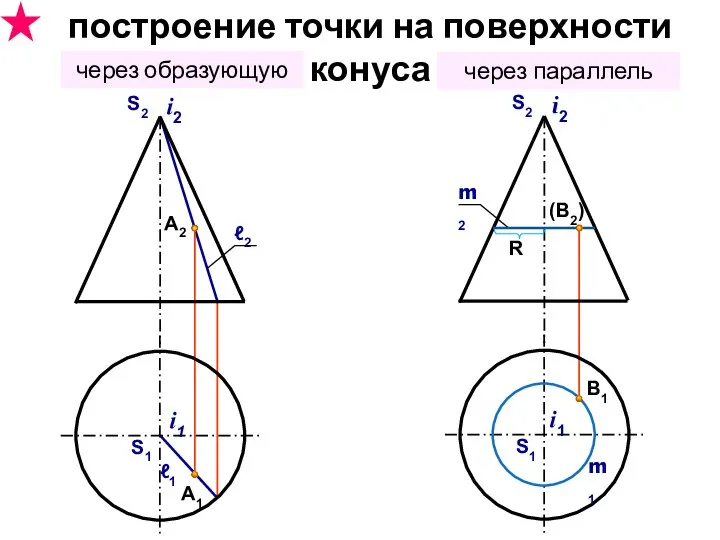
- 41. А2 А1 i2 S2 ℓ2 S1 i1 ℓ1 (B2) B1 i2 S2 m2 S1 i1 m1
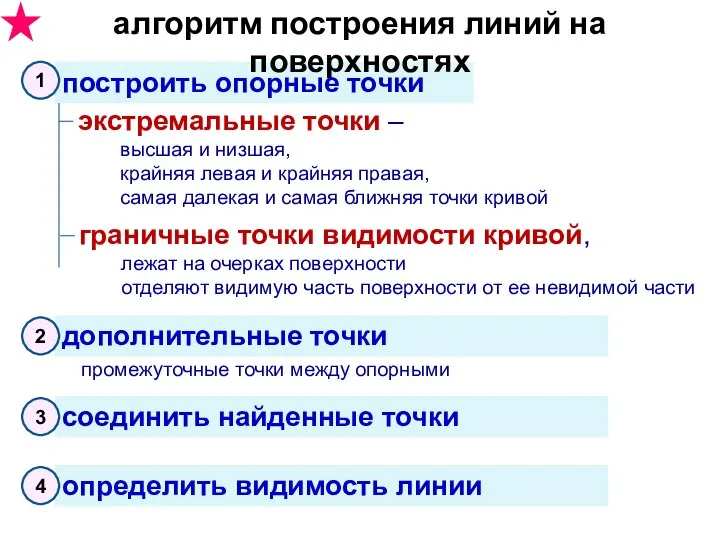
- 42. построить опорные точки экстремальные точки – высшая и низшая, крайняя левая и крайняя правая, самая далекая
- 44. Скачать презентацию
Слайд 2содержание лекции
кривые линии
поверхности
поверхности вращения
способы задания поверхности на чертеже
классификация поверхностей
условия принадлежности точки и
содержание лекции
кривые линии
поверхности
поверхности вращения
способы задания поверхности на чертеже
классификация поверхностей
условия принадлежности точки и
Слайд 3КРИВЫЕ ЛИНИИ
КРИВЫЕ ЛИНИИ
Слайд 4кривая линия
множество точек пространства,
координаты которых – функции одной переменной
кривая линия
множество точек пространства,
координаты которых – функции одной переменной
Слайд 5способы задания кривых линий
аналитический
графический
табличный
математическим уравнением
визуально
координатами
последовательного ряда точек
r = a φ
способы задания кривых линий
аналитический
графический
табличный
математическим уравнением
визуально
координатами
последовательного ряда точек
r = a φ
Слайд 6(частный случай эллипса)
плоские кривые линии
парабола
гипербола
эллипс
окружность
синусоида
все точки линии принадлежат одной
(частный случай эллипса)
плоские кривые линии
парабола
гипербола
эллипс
окружность
синусоида
все точки линии принадлежат одной

Слайд 7цилиндрическая винтовая линия
пространственные кривые линии
коническая
винтовая линия
цилиндрическая винтовая линия
пространственные кривые линии
коническая
винтовая линия
Слайд 8эллипса
проецирование окружности
окружность
окружности
на плоскости уровня
на проецирующей
или
плоскости общего положения
эллипса
проецирование окружности
окружность
окружности
на плоскости уровня
на проецирующей
или
плоскости общего положения
Слайд 9Задача Построить проекции
окружности с центром в точке О
и радиусом 30
Задача Построить проекции
окружности с центром в точке О
и радиусом 30
Слайд 10ПОВЕРХНОСТИ
ПОВЕРХНОСТИ
Слайд 11поверхность
неподвижная линия,
по которой перемещается образующая (m)
непрерывное множество
последовательных положений линии,
перемещающейся
поверхность
неподвижная линия,
по которой перемещается образующая (m)
непрерывное множество
последовательных положений линии,
перемещающейся
Слайд 12способы задания поверхности на чертеже
1. каркас
2. определитель
3. очерк
способы задания поверхности на чертеже
1. каркас
2. определитель
3. очерк
Слайд 13способы задания поверхности на чертеже
1. каркас – сеть линий, состоящая из двух
способы задания поверхности на чертеже
1. каркас – сеть линий, состоящая из двух
Слайд 14
например, определитель цилиндрической поверхности:
∆ (l, а); l || S; l ∩
например, определитель цилиндрической поверхности:
∆ (l, а); l || S; l ∩
Слайд 15способы задания поверхности на чертеже
3. очерк – проекция линии контура поверхности
контур поверхности
способы задания поверхности на чертеже
3. очерк – проекция линии контура поверхности
контур поверхности
Слайд 16способы задания поверхности на чертеже
3. очерк – проекция линии контура поверхности
никакая точка
способы задания поверхности на чертеже
3. очерк – проекция линии контура поверхности
никакая точка
Слайд 17образование проекций сферы
образование проекций сферы
Слайд 18по виду образующей:
1. линейчатые поверхности – с прямолинейной образующей
2. нелинейчатые
по виду образующей:
1. линейчатые поверхности – с прямолинейной образующей
2. нелинейчатые
Слайд 19по виду образующей
линейчатые
криволинейные
развертываемые
неразвертываемые
цилиндр
конус
пирамида
призма
образующая плоская
Образующая пространственная
сфера
эллипсоид
тор
образованы движением прямолинейной образующей
образованы движением криволинейной образующей
классификация поверхностей
по виду образующей
линейчатые
криволинейные
развертываемые
неразвертываемые
цилиндр
конус
пирамида
призма
образующая плоская
Образующая пространственная
сфера
эллипсоид
тор
образованы движением прямолинейной образующей
образованы движением криволинейной образующей
классификация поверхностей
Слайд 20по закону движения образующей
с плоскостью параллелизма
вращения
винтовые
конус
цилиндр
сфера
тор
коноид
цилиндроид
гиперболический параболоид
геликоид
классификация поверхностей
по закону движения образующей
с плоскостью параллелизма
вращения
винтовые
конус
цилиндр
сфера
тор
коноид
цилиндроид
гиперболический параболоид
геликоид
классификация поверхностей
Слайд 21ПОВЕРХНОСТИ ВРАЩЕНИЯ
ПОВЕРХНОСТИ ВРАЩЕНИЯ
Слайд 22поверхность созданная при вращении образующей m вокруг оси
(неподвижной прямой) i
поверхность вращения
поверхность созданная при вращении образующей m вокруг оси
(неподвижной прямой) i
поверхность вращения
Слайд 23образующая может иметь любой вид
при вращении
каждая точка образующей
совершает движение
по
образующая может иметь любой вид
при вращении
каждая точка образующей
совершает движение
по
Слайд 24сфера
тор
параболоид вращения
гиперболоид вращения
однополостной
двуполостной
примеры поверхностей вращения
сфера
тор
параболоид вращения
гиперболоид вращения
однополостной
двуполостной
примеры поверхностей вращения
Слайд 25поверхность вращения
поверхность вращения
Слайд 26поверхность вращения
меридиан
линия по которой плоскость, проходящая через ось вращения, пересекает поверхность
главный
поверхность вращения
меридиан
линия по которой плоскость, проходящая через ось вращения, пересекает поверхность
главный

Слайд 27поверхность вращения
главный меридиан (Г.М.)
расположен в плоскости, параллельной плоскости проекций
и проецируется на
поверхность вращения
главный меридиан (Г.М.)
расположен в плоскости, параллельной плоскости проекций
и проецируется на
Слайд 28поверхность вращения
параллели
окружности, по которым перемещаются все точки образующей
экватор
наибольшая параллель
горловина (горло)
наименьшая параллель
поверхность вращения
параллели
окружности, по которым перемещаются все точки образующей
экватор
наибольшая параллель
горловина (горло)
наименьшая параллель
Слайд 29поверхность вращения
на горизонтальной проекции
без искажения в виде окружностей
на фронтальной проекции
в
поверхность вращения
на горизонтальной проекции
без искажения в виде окружностей
на фронтальной проекции
в

Слайд 30поверхность вращения
горловина –
самая маленькая окружность очерка поверхности на П1
экватор –
самая большая окружность
поверхность вращения
горловина –
самая маленькая окружность очерка поверхности на П1
экватор –
самая большая окружность
Слайд 31цилиндр вращения
комплексный чертеж
наглядное
изображение
цилиндр вращения
комплексный чертеж
наглядное
изображение
Слайд 32сфера
комплексный чертеж
наглядное
изображение
линия на сфере
(окружность
во фронтальной плоскости уровня)
сфера
комплексный чертеж
наглядное
изображение
линия на сфере
(окружность
во фронтальной плоскости уровня)
Слайд 33конус вращения
конус вращения
Слайд 34поверхность вращения
ГРАНИЦЫ ВИДИМОСТИ ТОЧЕК И ЛИНИЙ
необходимы для определения видимости и положения точек
поверхность вращения
ГРАНИЦЫ ВИДИМОСТИ ТОЧЕК И ЛИНИЙ
необходимы для определения видимости и положения точек
Слайд 35условия принадлежности
точки и линии поверхности
точка принадлежит поверхности,
если она принадлежит линии,
условия принадлежности
точки и линии поверхности
точка принадлежит поверхности, если она принадлежит линии,
Слайд 36точки на цилиндре вращения
точки на цилиндре вращения
Слайд 37построение точки на поверхности цилиндра
i1
i2
i3
M2
M1
yM
yM
M3
граница видимости на п2
границы видимости
граница видимости на
построение точки на поверхности цилиндра
i1
i2
i3
M2
M1
yM
yM
M3
граница видимости на п2
границы видимости
граница видимости на
Слайд 38точки на сфере
( )
( )
точки на сфере
( )
( )
Слайд 39построение точки на поверхности сферы
N1
граница видимости на п2
Границы видимости
граница видимости на
построение точки на поверхности сферы
N1
граница видимости на п2
Границы видимости
граница видимости на
Слайд 40точки на конусе вращения
точки на конусе вращения

Слайд 41А2
А1
i2
S2
ℓ2
S1
i1
ℓ1
(B2)
B1
i2
S2
m2
S1
i1
m1
R
построение точки на поверхности конуса
через образующую
через параллель
А2
А1
i2
S2
ℓ2
S1
i1
ℓ1
(B2)
B1
i2
S2
m2
S1
i1
m1
R
построение точки на поверхности конуса
через образующую
через параллель
Слайд 42построить опорные точки
экстремальные точки –
высшая и низшая,
крайняя левая и крайняя
построить опорные точки
экстремальные точки – высшая и низшая, крайняя левая и крайняя
 Логарифмические функции
Логарифмические функции Объёмные фигуры и формулы нахождения объёма
Объёмные фигуры и формулы нахождения объёма Перпендикулярные прямые. Самостоятельная работа
Перпендикулярные прямые. Самостоятельная работа Счет десятками
Счет десятками История одной задачи
История одной задачи Высоты треугольника
Высоты треугольника Найдите производные
Найдите производные Решение логических задач с помощью нескольких таблиц. Вычислительные таблицы
Решение логических задач с помощью нескольких таблиц. Вычислительные таблицы Сфера и шар
Сфера и шар Параллельные прямые в пространстве
Параллельные прямые в пространстве Презентация на тему Длина отрезка
Презентация на тему Длина отрезка  Построение графика производной методом касательных
Построение графика производной методом касательных Координаты вектора в пространстве. 12 кл
Координаты вектора в пространстве. 12 кл Многоугольники в нашей жизни
Многоугольники в нашей жизни Степенная функция
Степенная функция Параллельность плоскостей. Лекция 4
Параллельность плоскостей. Лекция 4 Область визначення функції
Область визначення функції Приемы вычислений для случаев вида 26+7. 2 класс
Приемы вычислений для случаев вида 26+7. 2 класс Веселая математика!
Веселая математика! Сложение и вычитание дробей с одинаковыми знаменателями. Решение уравнений
Сложение и вычитание дробей с одинаковыми знаменателями. Решение уравнений Линейные неравенства
Линейные неравенства Презентация на тему Элементы статистики
Презентация на тему Элементы статистики  Решение геометрических задач на нахождение площадей поверхностей и объемов многогранников
Решение геометрических задач на нахождение площадей поверхностей и объемов многогранников Схема Горнера
Схема Горнера Симметрия 11кл
Симметрия 11кл Решение линейных уравнений с одной переменной
Решение линейных уравнений с одной переменной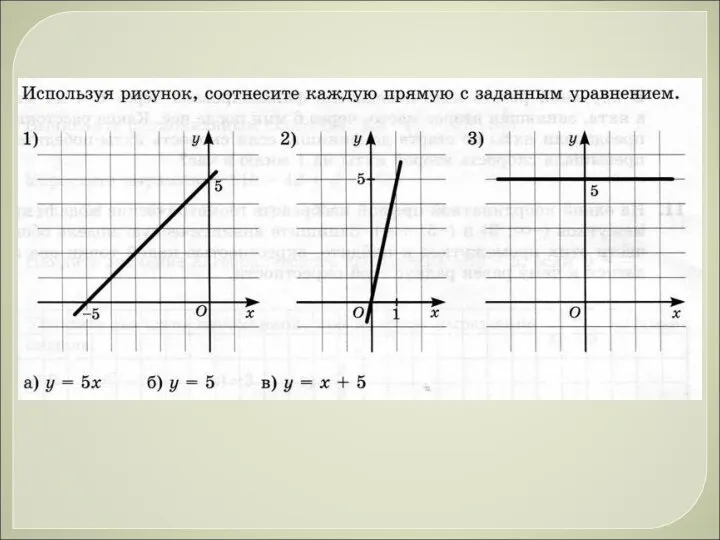 Соотношение прямой с заданным уравнением
Соотношение прямой с заданным уравнением Квадратичная функция и её график
Квадратичная функция и её график