- Моделирование линейных звеньев. Лекция 9

Содержание
- 2. Литература Монаков А.А. Основы математического моделирования радиотехнических систем. Учебное пособие. – СПб.: ГУАП, 2005. – 100с.
- 3. Литература А.Б.Сергиенко. Цифровая обработка сигналов. СПб, Питер, 2002. — 608 с.: ил. А.Б.Сергиенко. Signal Processing Toolbox
- 4. Литература Ричард Лайонс - Цифровая обработка сигналов / Understanding Digital Signal Processing, 2006 Глава 5. Фильтры
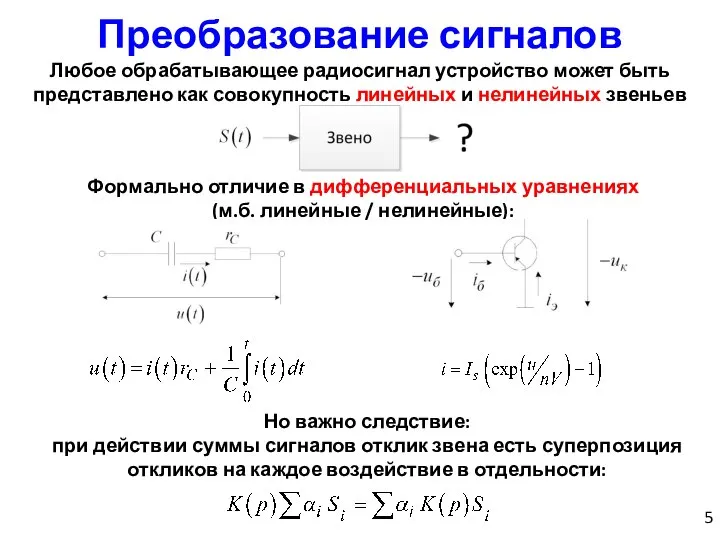
- 5. Преобразование сигналов Любое обрабатывающее радиосигнал устройство может быть представлено как совокупность линейных и нелинейных звеньев Формально
- 6. Коэффициент передачи Линейное звено описывается дифференциальным уравнением: Нам достаточно научиться его решать для воздействия а потом
- 7. Коэффициент передачи Нетрудно заметить, что в этом случае Да это же не только комплексная амплитуда, но
- 8. Коэффициент передачи clear all; clc; close all; RC = 1e-6; a = [RC 1]; b =
- 9. Коэффициент передачи clear all; clc; close all; RC = 1e-6; a = [RC 1]; b =
- 10. Функция unwrap
- 11. Импульсная характеристика (ИХ) А можно и через преобразование Лапласа: Умножению в частотной области соответствует свертка во
- 12. Импульсная характеристика Для построения импульсной характеристики можно воспользоваться функциями Сontrol System Toolbox RC = 1e-6; a
- 13. Нули и полюсы Функцию передачи можно представить в виде здесь – коэффициент усиления, – нули, –
- 14. Цифровые фильтры Всё это здорово, наглядно и удобно описывает аналоговые системы, но нам же нужно уметь
- 15. Импульсная характеристика Т.к. система линейна, то может описываться только уравнением вида: Непрерывные линейные системы характеризуются импульсной
- 16. impz(…) clear all; close all; clc a = [1 -0.7]; b = [0.3]; h = impz(b,
- 17. Свертка: conv(…), deconv(…) Можем воспользоваться функциями conv и deconv clear all; close all; clc a =
- 18. Transfer function Вспоминаем РЦС, z-преобразование и его свойства: Или из уравнения: Связь с преобразованием Фурье:
- 19. Transfer function clear all; close all; clc a = [-0.7]; b = [0.3]; xр = [1
- 20. freqz(…) clear all; close all; clc a = [1 -0.7]; b = [0.3]; H = freqz(b,
- 21. filter(…) clear all; close all; clc a = [1 -0.7]; b = [0.3]; x = [0
- 22. Нули и полюсы clear all; close all; clc a = [1 -0.7]; b = [0.3]; [z,
- 23. Метод инвариантности h(t) Реализовывать цифровые фильтры в MATLAB научились, вернемся к задаче синтеза цифрового фильтра по
- 24. Метод билинейного преобразования Поделим на Да это же пачки интеграторов!
- 25. Метод билинейного преобразования А давайте аналоговый интегратор заменим цифровым! Интегрировать будем методом трапеций: Итого, в качестве
- 26. Метод билинейного преобразования Полуплоскость переменной s отображается в окружность единичного радиуса в плоскости переменной z Есть
- 27. Метод билинейного преобразования Пример. Смоделируем RC цепь, что использовали ранее. clear all; clc; close all; RC
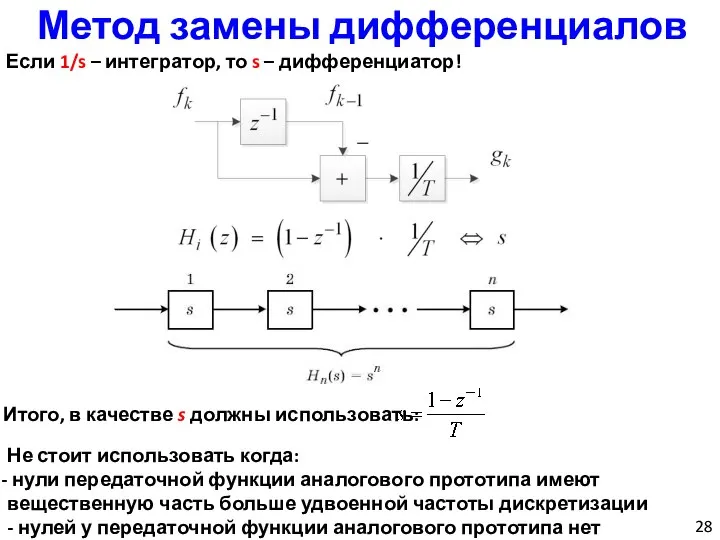
- 28. Метод замены дифференциалов Если 1/s – интегратор, то s – дифференциатор! Итого, в качестве s должны
- 29. Метод замены дифференциалов Пример. Смоделируем RC цепь. … az = [1+RC/T, -RC/T]; bz = [1]; Hz
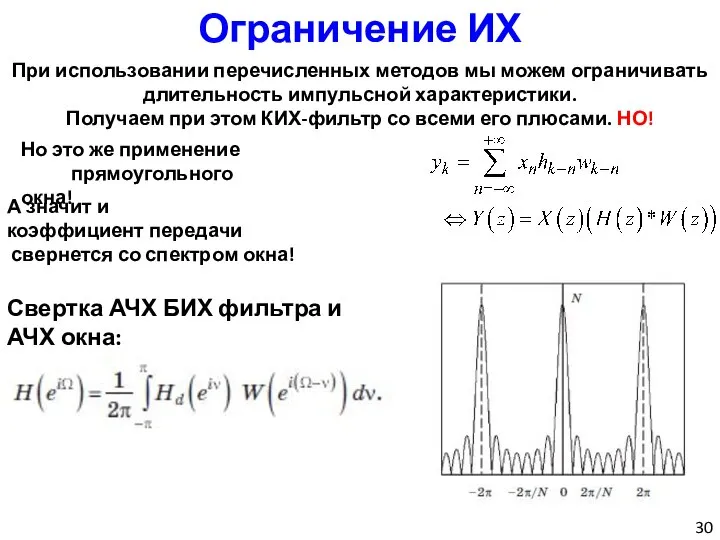
- 30. Ограничение ИХ При использовании перечисленных методов мы можем ограничивать длительность импульсной характеристики. Получаем при этом КИХ-фильтр
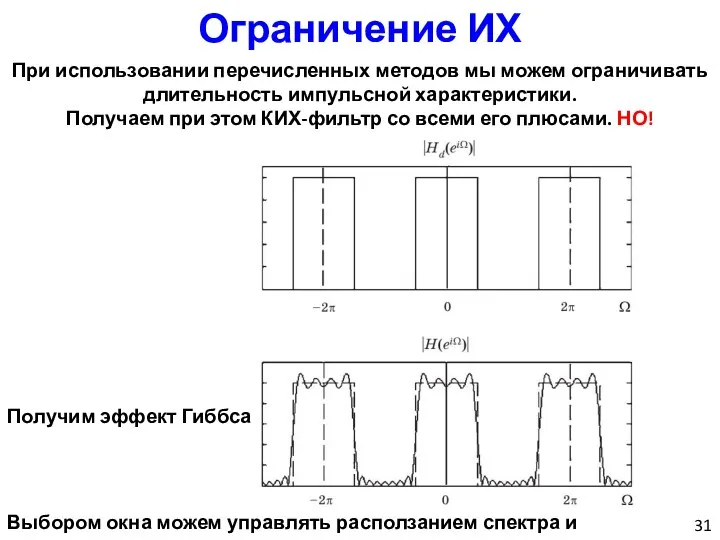
- 31. Ограничение ИХ При использовании перечисленных методов мы можем ограничивать длительность импульсной характеристики. Получаем при этом КИХ-фильтр
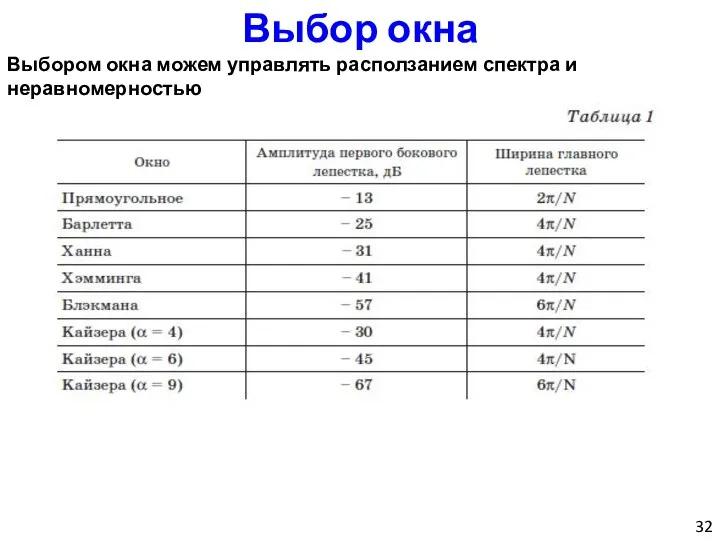
- 32. Выбор окна Выбором окна можем управлять расползанием спектра и неравномерностью
- 34. Скачать презентацию
Слайд 2Литература
Монаков А.А. Основы математического моделирования радиотехнических систем. Учебное пособие. – СПб.: ГУАП,
Литература
Монаков А.А. Основы математического моделирования радиотехнических систем. Учебное пособие. – СПб.: ГУАП,
Слайд 3Литература
А.Б.Сергиенко. Цифровая обработка сигналов. СПб, Питер, 2002. — 608 с.: ил.
А.Б.Сергиенко.
Signal
Литература
А.Б.Сергиенко. Цифровая обработка сигналов. СПб, Питер, 2002. — 608 с.: ил.
А.Б.Сергиенко.
Signal
Слайд 4Литература
Ричард Лайонс - Цифровая обработка сигналов / Understanding Digital Signal Processing, 2006
Глава
Литература
Ричард Лайонс - Цифровая обработка сигналов / Understanding Digital Signal Processing, 2006
Глава
Слайд 5Преобразование сигналов
Любое обрабатывающее радиосигнал устройство может быть представлено как совокупность линейных и
Преобразование сигналов
Любое обрабатывающее радиосигнал устройство может быть представлено как совокупность линейных и
Слайд 6Коэффициент передачи
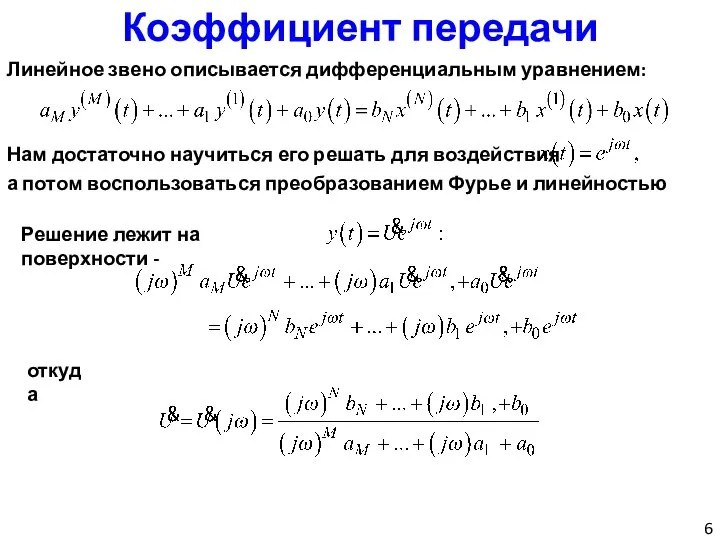
Линейное звено описывается дифференциальным уравнением:
Нам достаточно научиться его решать для воздействия
а
Коэффициент передачи
Линейное звено описывается дифференциальным уравнением:
Нам достаточно научиться его решать для воздействия
а
Слайд 7Коэффициент передачи
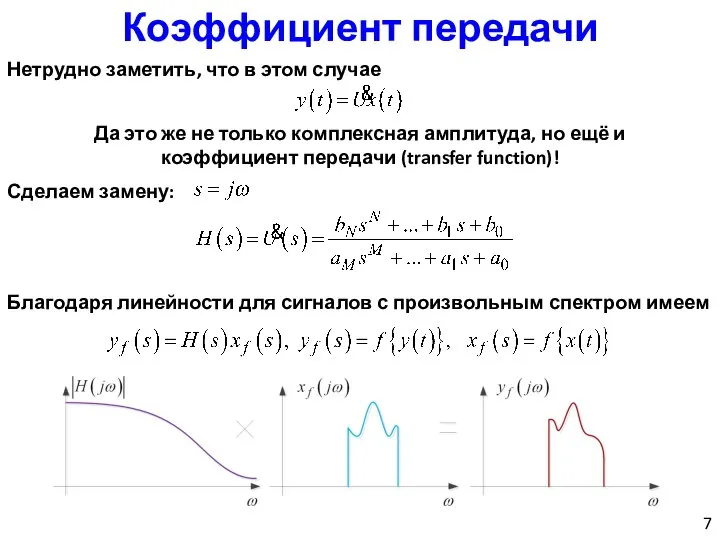
Нетрудно заметить, что в этом случае
Да это же не только комплексная
Коэффициент передачи
Нетрудно заметить, что в этом случае
Да это же не только комплексная
Слайд 8Коэффициент передачи
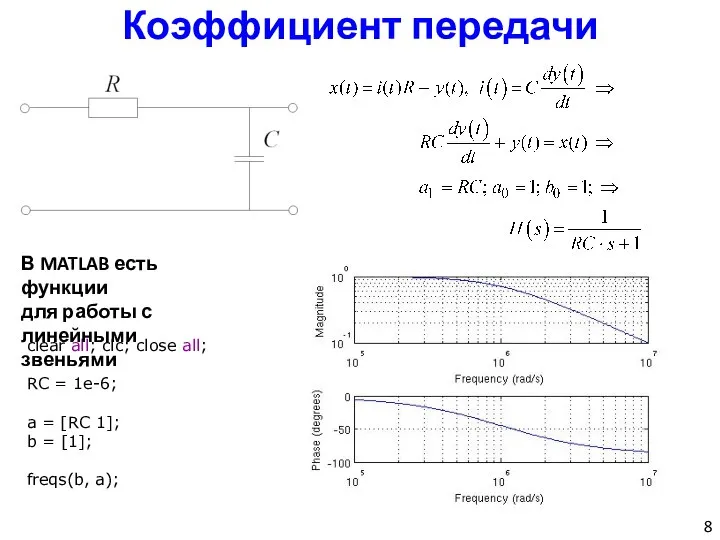
clear all; clc; close all;
RC = 1e-6;
a = [RC 1];
b =
Коэффициент передачи
clear all; clc; close all;
RC = 1e-6;
a = [RC 1];
b =
Слайд 9Коэффициент передачи
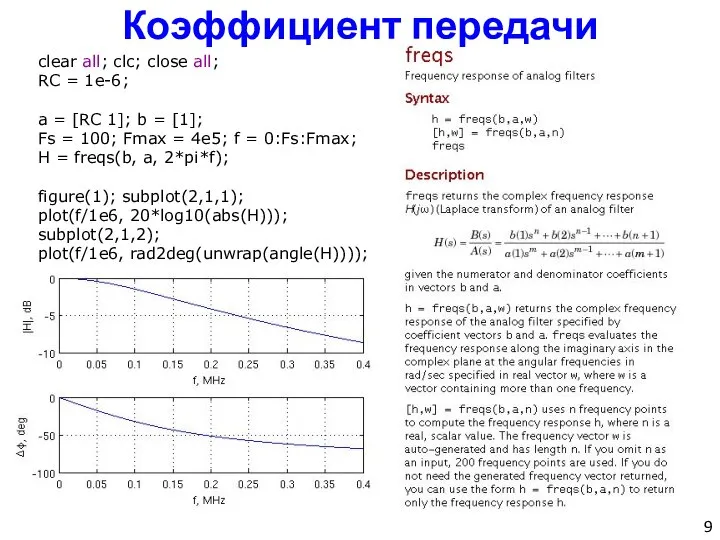
clear all; clc; close all;
RC = 1e-6;
a = [RC 1]; b
Коэффициент передачи
clear all; clc; close all;
RC = 1e-6;
a = [RC 1]; b
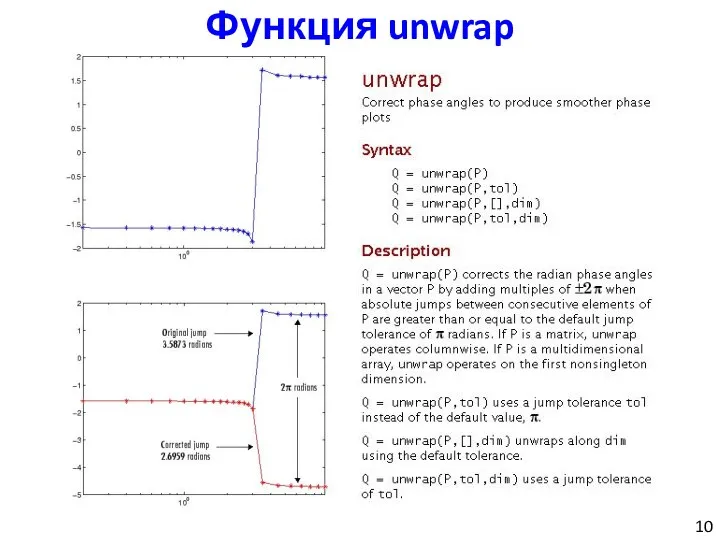
Слайд 10Функция unwrap
Функция unwrap
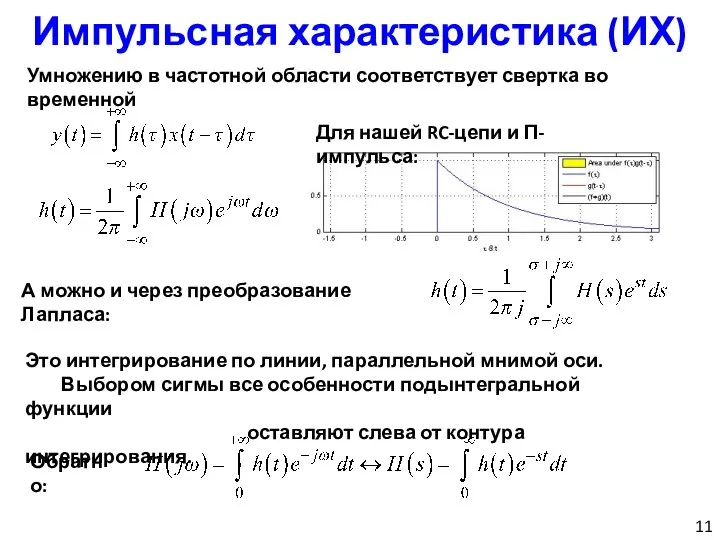
Слайд 11Импульсная характеристика (ИХ)
А можно и через преобразование Лапласа:
Умножению в частотной области соответствует
Импульсная характеристика (ИХ)
А можно и через преобразование Лапласа:
Умножению в частотной области соответствует
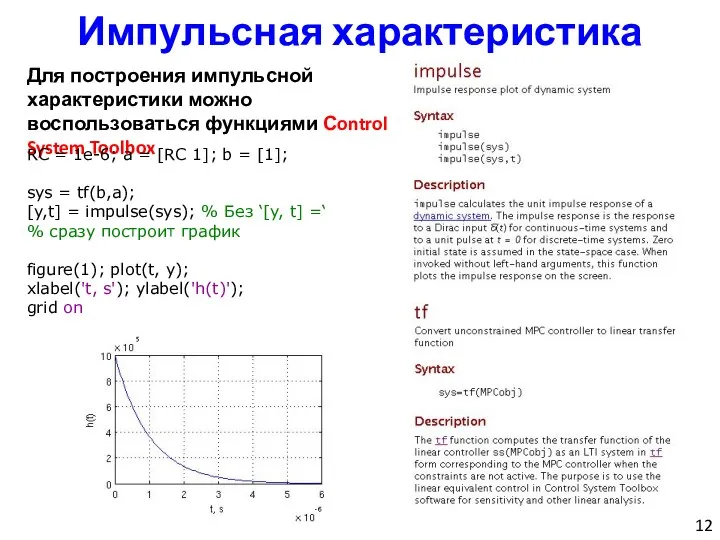
Слайд 12Импульсная характеристика
Для построения импульсной характеристики можно воспользоваться функциями Сontrol System Toolbox
RC =
Импульсная характеристика
Для построения импульсной характеристики можно воспользоваться функциями Сontrol System Toolbox
RC =
Слайд 13Нули и полюсы
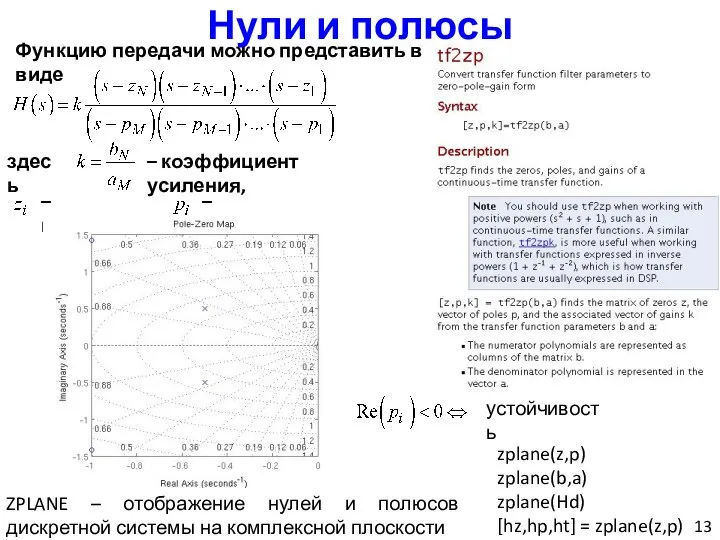
Функцию передачи можно представить в виде
здесь
– коэффициент усиления,
– нули,
– полюсы
устойчивость
ZPLANE
Нули и полюсы
Функцию передачи можно представить в виде
здесь
– коэффициент усиления,
– нули,
– полюсы
устойчивость
ZPLANE
Слайд 14Цифровые фильтры
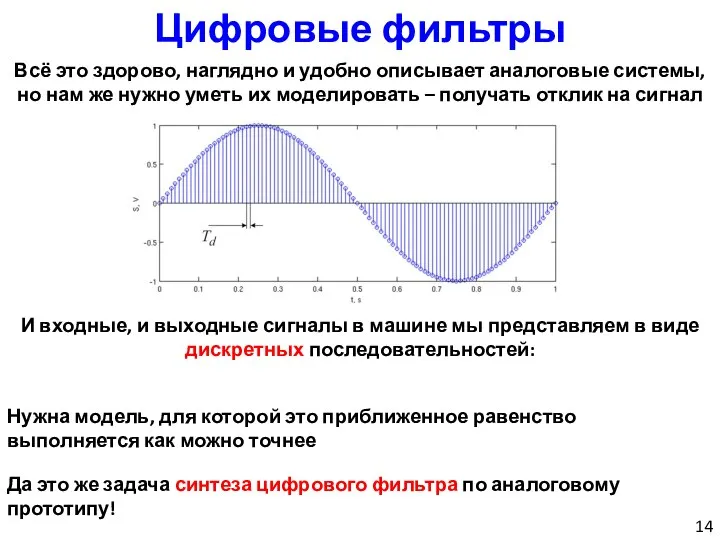
Всё это здорово, наглядно и удобно описывает аналоговые системы, но нам
Цифровые фильтры
Всё это здорово, наглядно и удобно описывает аналоговые системы, но нам
Слайд 15Импульсная характеристика
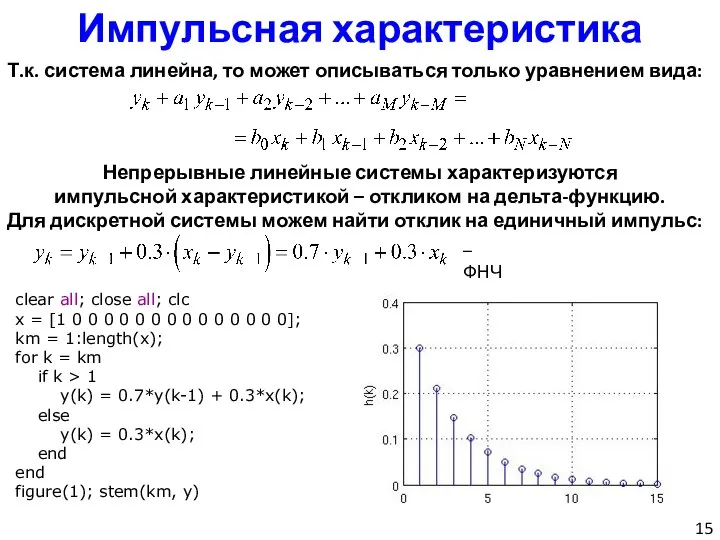
Т.к. система линейна, то может описываться только уравнением вида:
Непрерывные линейные системы
Импульсная характеристика
Т.к. система линейна, то может описываться только уравнением вида:
Непрерывные линейные системы
Слайд 16impz(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
h =
impz(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
h =
![impz(…) clear all; close all; clc a = [1 -0.7]; b =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/939882/slide-15.jpg)
Слайд 17Свертка: conv(…), deconv(…)
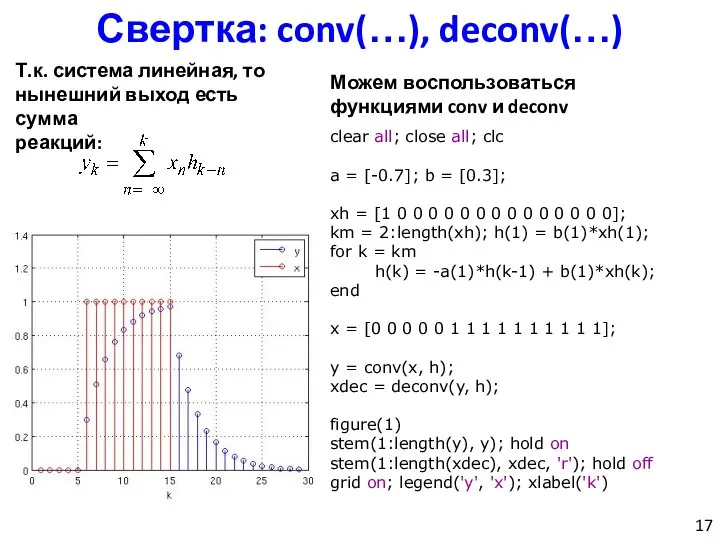
Можем воспользоваться функциями conv и deconv
clear all; close all; clc
a
Свертка: conv(…), deconv(…)
Можем воспользоваться функциями conv и deconv
clear all; close all; clc
a
Слайд 18Transfer function
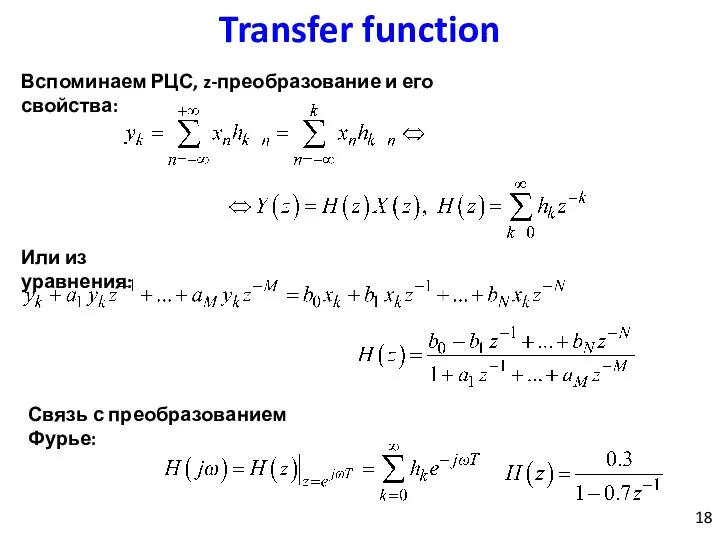
Вспоминаем РЦС, z-преобразование и его свойства:
Или из уравнения:
Связь с преобразованием Фурье:
Transfer function
Вспоминаем РЦС, z-преобразование и его свойства:
Или из уравнения:
Связь с преобразованием Фурье:
Слайд 19Transfer function
clear all; close all; clc
a = [-0.7]; b = [0.3];
xр =
Transfer function
clear all; close all; clc
a = [-0.7]; b = [0.3];
xр =
![Transfer function clear all; close all; clc a = [-0.7]; b =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/939882/slide-18.jpg)
Слайд 20freqz(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
H =
freqz(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
H =
![freqz(…) clear all; close all; clc a = [1 -0.7]; b =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/939882/slide-19.jpg)
Слайд 21filter(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
x =
filter(…)
clear all; close all; clc
a = [1 -0.7]; b = [0.3];
x =
![filter(…) clear all; close all; clc a = [1 -0.7]; b =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/939882/slide-20.jpg)
Слайд 22Нули и полюсы
clear all; close all; clc
a = [1 -0.7]; b =
Нули и полюсы
clear all; close all; clc
a = [1 -0.7]; b =
![Нули и полюсы clear all; close all; clc a = [1 -0.7];](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/939882/slide-21.jpg)
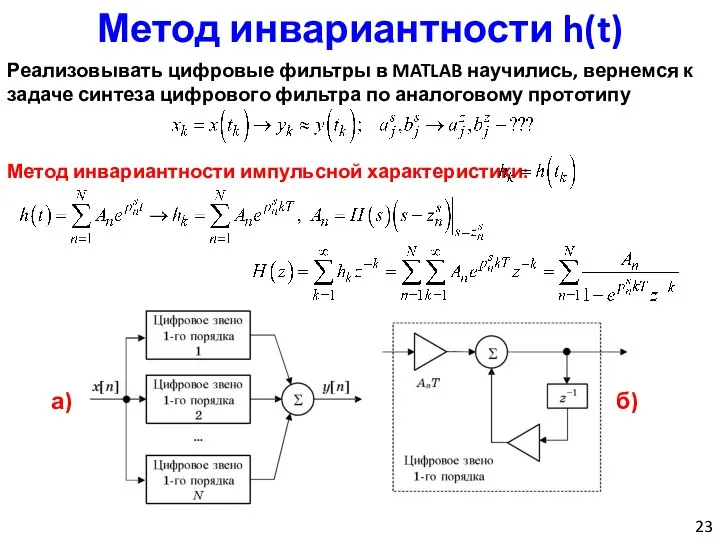
Слайд 23Метод инвариантности h(t)
Реализовывать цифровые фильтры в MATLAB научились, вернемся к задаче синтеза
Метод инвариантности h(t)
Реализовывать цифровые фильтры в MATLAB научились, вернемся к задаче синтеза
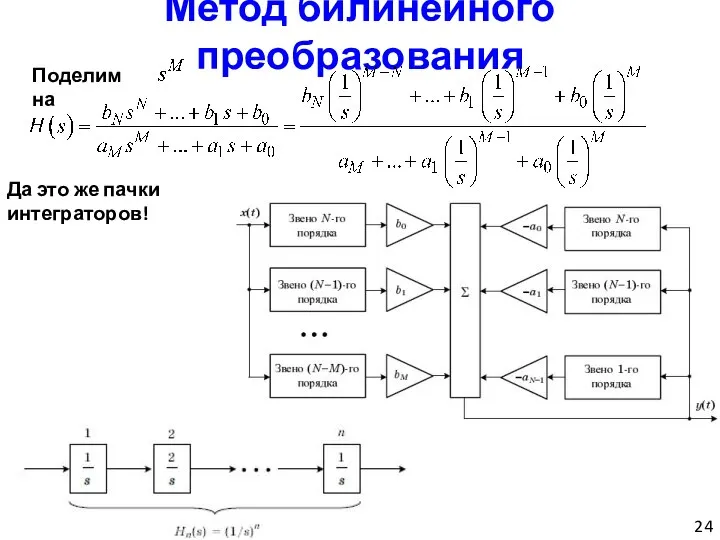
Слайд 24Метод билинейного преобразования
Поделим на
Да это же пачки интеграторов!
Метод билинейного преобразования
Поделим на
Да это же пачки интеграторов!
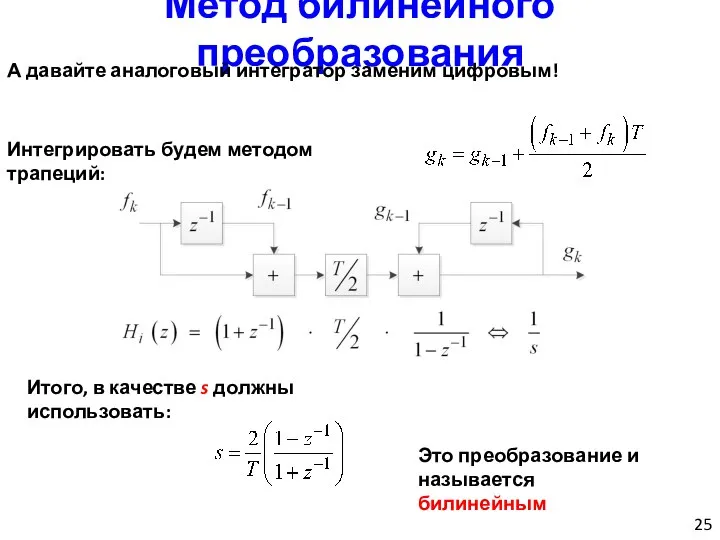
Слайд 25Метод билинейного преобразования
А давайте аналоговый интегратор заменим цифровым!
Интегрировать будем методом трапеций:
Итого,
Метод билинейного преобразования
А давайте аналоговый интегратор заменим цифровым!
Интегрировать будем методом трапеций:
Итого,
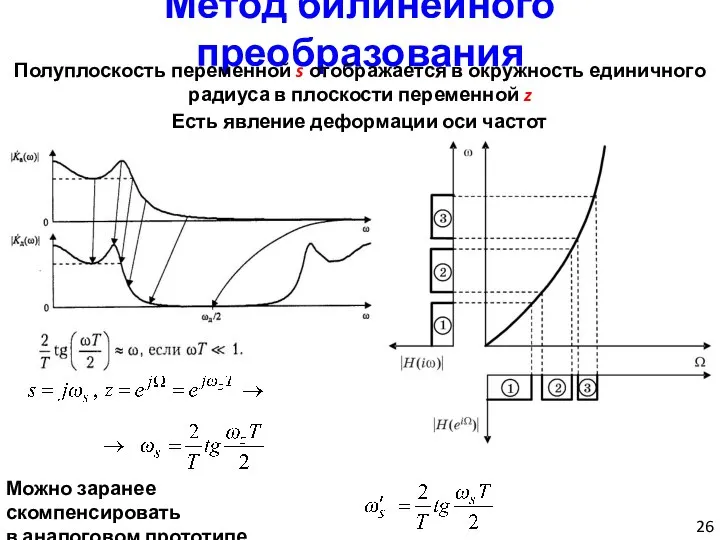
Слайд 26Метод билинейного преобразования
Полуплоскость переменной s отображается в окружность единичного радиуса в плоскости
Метод билинейного преобразования
Полуплоскость переменной s отображается в окружность единичного радиуса в плоскости
Слайд 27Метод билинейного преобразования
Пример. Смоделируем RC цепь, что использовали ранее.
clear all; clc; close
Метод билинейного преобразования
Пример. Смоделируем RC цепь, что использовали ранее.
clear all; clc; close

Слайд 28Метод замены дифференциалов
Если 1/s – интегратор, то s – дифференциатор!
Итого, в качестве
Метод замены дифференциалов
Если 1/s – интегратор, то s – дифференциатор!
Итого, в качестве
Слайд 29Метод замены дифференциалов
Пример. Смоделируем RC цепь.
…
az = [1+RC/T, -RC/T]; bz = [1];
Hz
Метод замены дифференциалов
Пример. Смоделируем RC цепь.
…
az = [1+RC/T, -RC/T]; bz = [1];
Hz
![Метод замены дифференциалов Пример. Смоделируем RC цепь. … az = [1+RC/T, -RC/T];](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/939882/slide-28.jpg)
Слайд 30Ограничение ИХ
При использовании перечисленных методов мы можем ограничивать длительность импульсной характеристики.
Получаем при
Ограничение ИХ
При использовании перечисленных методов мы можем ограничивать длительность импульсной характеристики.
Получаем при
Слайд 31Ограничение ИХ
При использовании перечисленных методов мы можем ограничивать длительность импульсной характеристики.
Получаем при
Ограничение ИХ
При использовании перечисленных методов мы можем ограничивать длительность импульсной характеристики.
Получаем при
Слайд 32Выбор окна
Выбором окна можем управлять расползанием спектра и неравномерностью
Выбор окна
Выбором окна можем управлять расползанием спектра и неравномерностью
 Стереометрия
Стереометрия Правильные многоугольники в нашей жизни
Правильные многоугольники в нашей жизни Решение задач
Решение задач Математика в лицах
Математика в лицах Математика на страницах книг
Математика на страницах книг Математическая статистика
Математическая статистика Теорема Фалеса
Теорема Фалеса Элементы математической статистики, комбинаторики и теории вероятностей
Элементы математической статистики, комбинаторики и теории вероятностей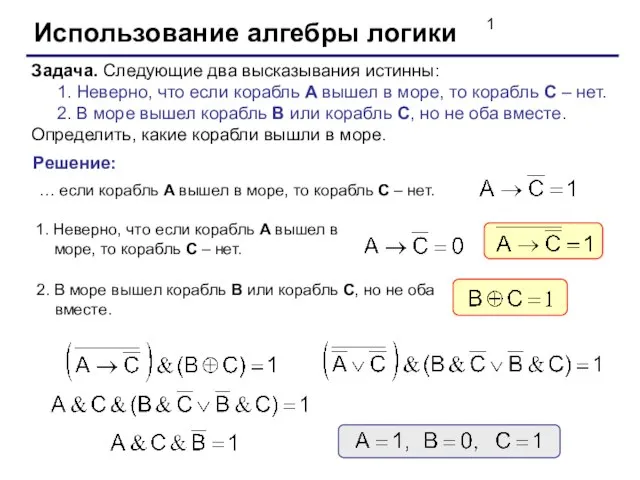 Использование алгебры логики. Задача про карабли
Использование алгебры логики. Задача про карабли Презентация на тему Математический супертест
Презентация на тему Математический супертест  a ≥ 0 и b ≥ 0
a ≥ 0 и b ≥ 0 Решай, смекай, отгадывай!. Интерактивная математическая игра
Решай, смекай, отгадывай!. Интерактивная математическая игра Презентация на тему Решение уравнений графическим способом
Презентация на тему Решение уравнений графическим способом  Подготовка к ЕГЭ. Графическое решение уравнений и неравенств
Подготовка к ЕГЭ. Графическое решение уравнений и неравенств Перенос запятой в положительной десятичной дроби
Перенос запятой в положительной десятичной дроби Великие математики
Великие математики Презентация на тему Свойства функции
Презентация на тему Свойства функции  Логарифмы
Логарифмы Квадратные уравнения. Повторение. 8 класс
Квадратные уравнения. Повторение. 8 класс Обобщение по теме Новая запись числа. 5 класс
Обобщение по теме Новая запись числа. 5 класс Интегрированный урок алгебры и экономики. 7 класс
Интегрированный урок алгебры и экономики. 7 класс Определенный интеграл. Формула
Определенный интеграл. Формула Презентация на тему Деление с остатком
Презентация на тему Деление с остатком  Площадь поверхности цилиндра
Площадь поверхности цилиндра Открытый урок «Математический бой» 11класс
Открытый урок «Математический бой» 11класс Complete each of the following:
Complete each of the following: Параллельные прямые. Признак параллельности прямых по равенству накрест лежащих углов
Параллельные прямые. Признак параллельности прямых по равенству накрест лежащих углов Подготовка к ЕГЭ. вычисление значений производной. В8
Подготовка к ЕГЭ. вычисление значений производной. В8