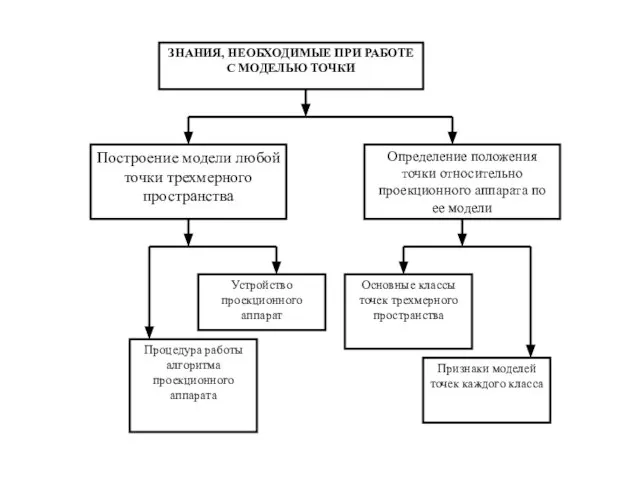
- МОДЕЛЬ ТОЧКИ

Содержание
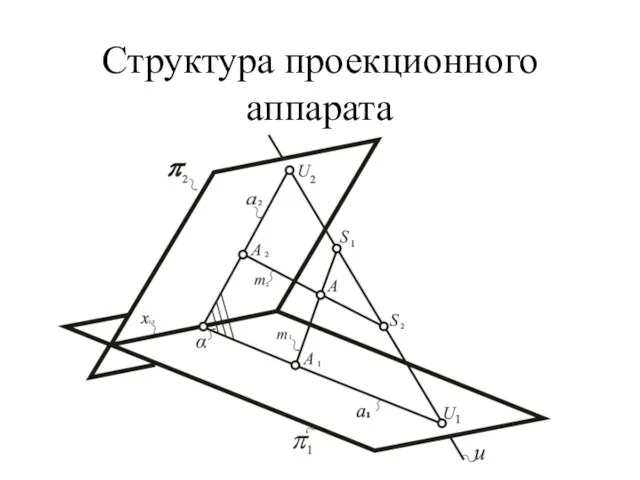
- 3. Структура проекционного аппарата
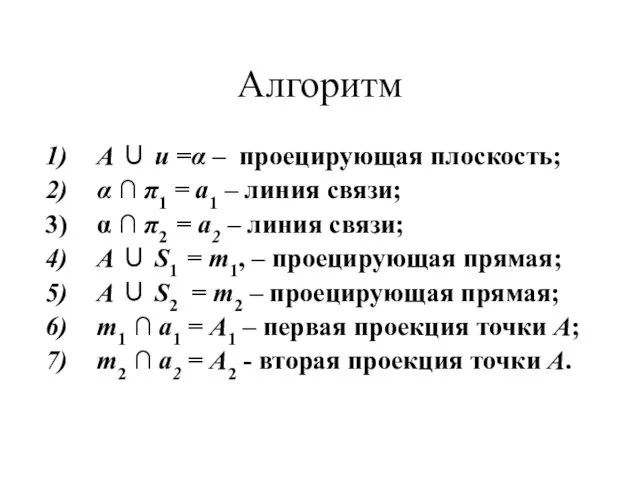
- 4. Алгоритм A ∪ u =α – проецирующая плоскость; α ∩ π1 = а1 – линия связи;
- 5. Модель точки трехмерного пространства, построенной методом двух изображений -два ее изображения (проекции), которые принадлежат двойной линии
- 6. КЛАССИФИКАЦИЯ ТОЧЕК ТРЕХМЕРНОГО ПРОСТРАНСТВА 1. Точки частного положения Точки принадлежащие картинам. Бесконечно удаленные точки. Точки, принадлежащие
- 7. Задача 1. Построение плоской модели точки трехмерного пространства перспектива
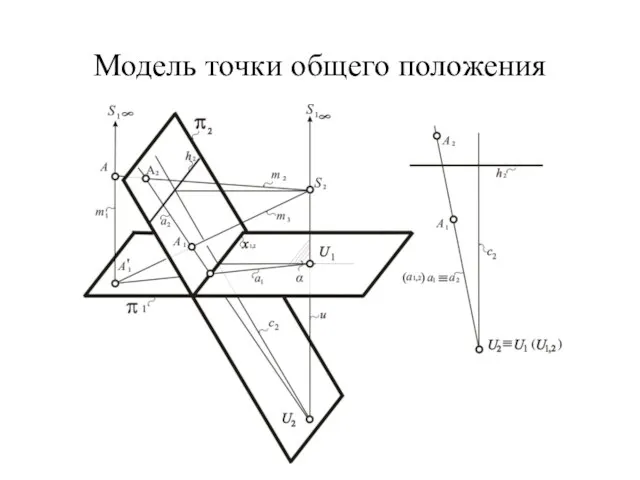
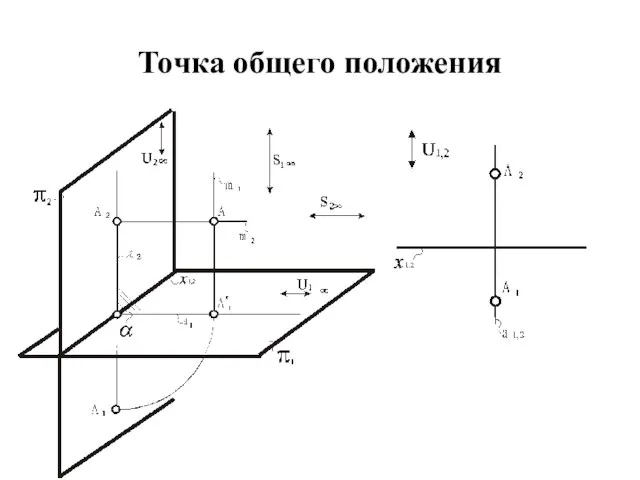
- 9. Модель точки общего положения
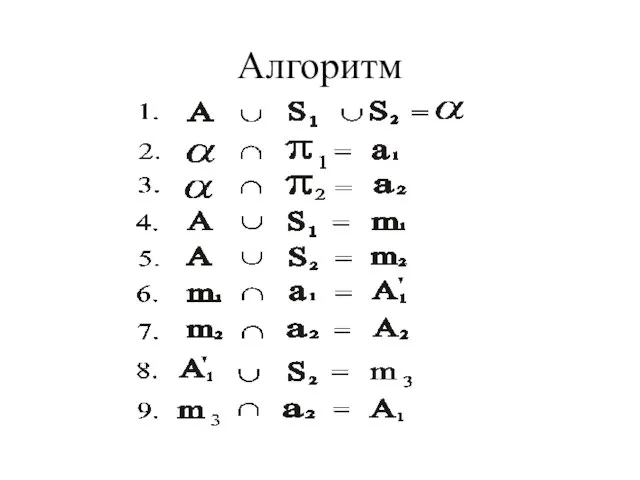
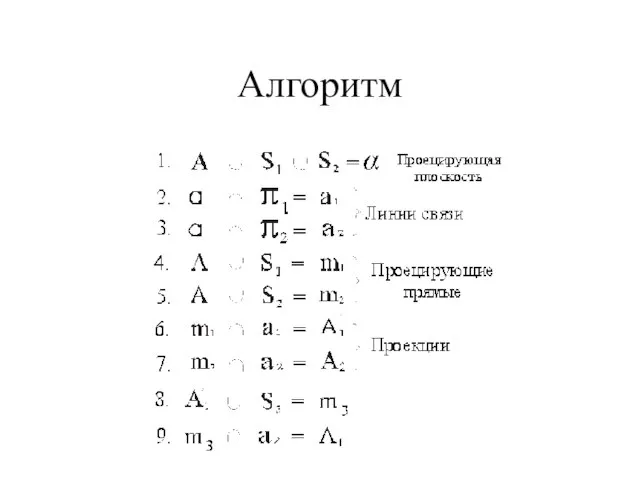
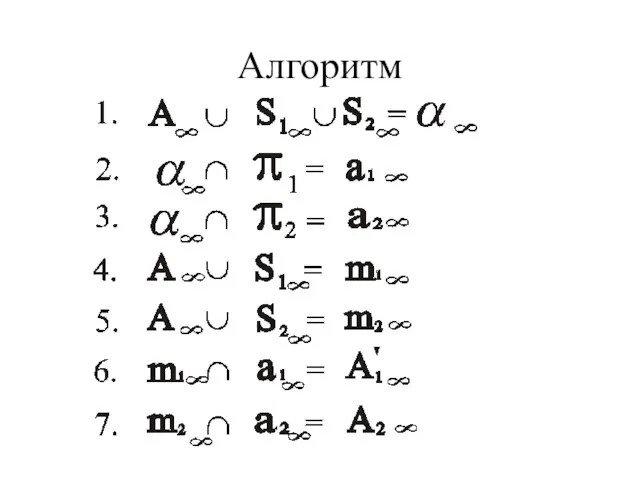
- 10. Алгоритм
- 11. Модели точек частного положения Характерные признаки
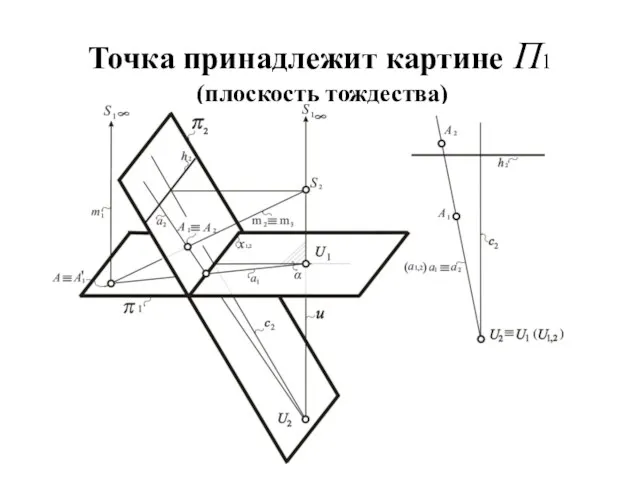
- 12. Точка принадлежит картине П1 (плоскость тождества)
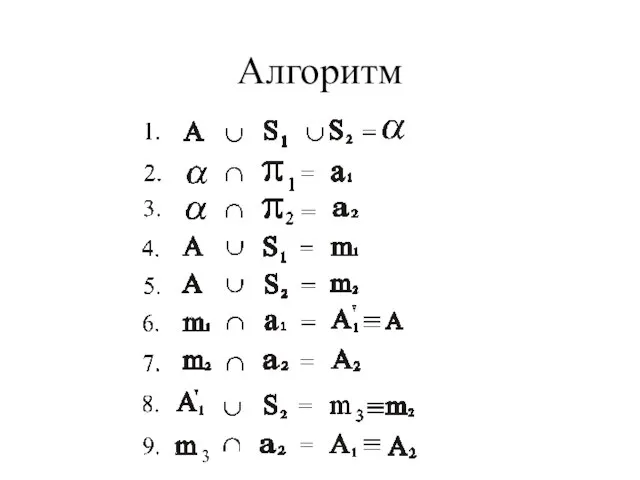
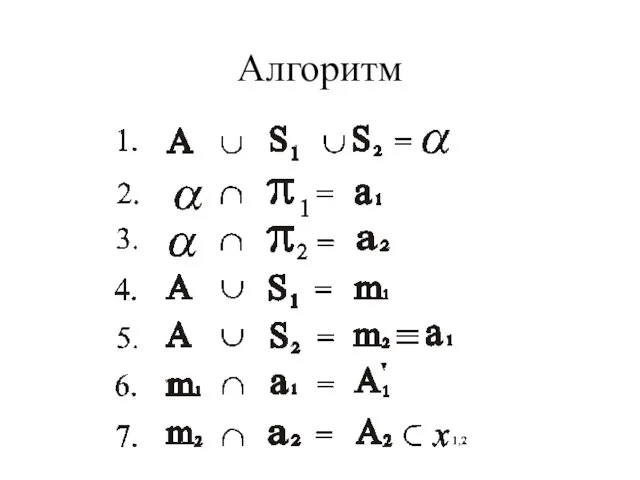
- 13. Алгоритм
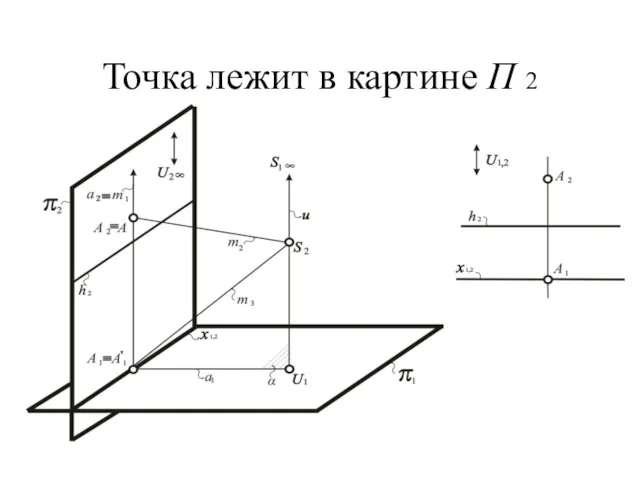
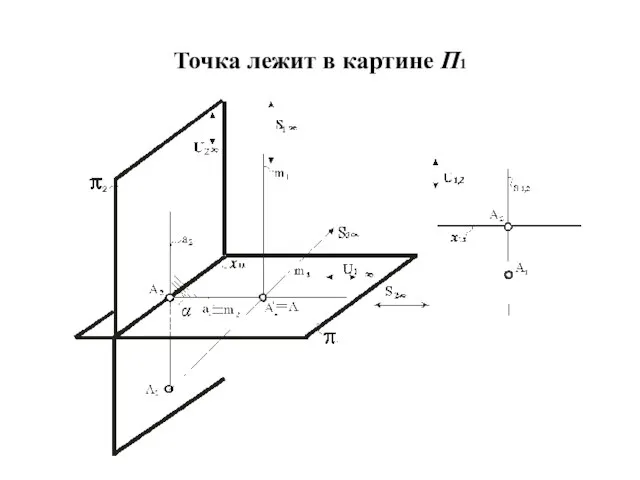
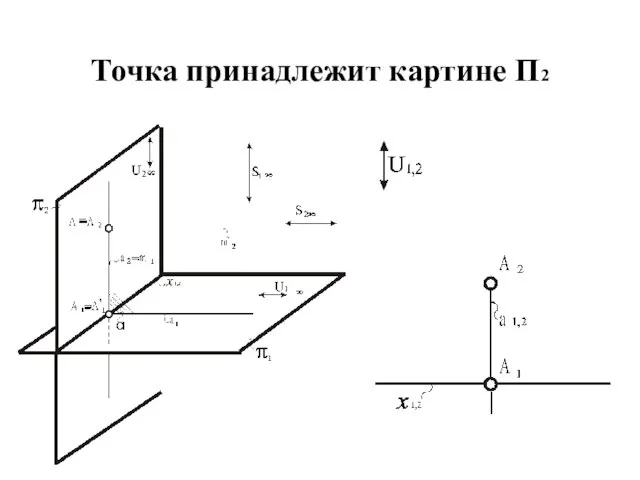
- 14. Точка лежит в картине Π 2
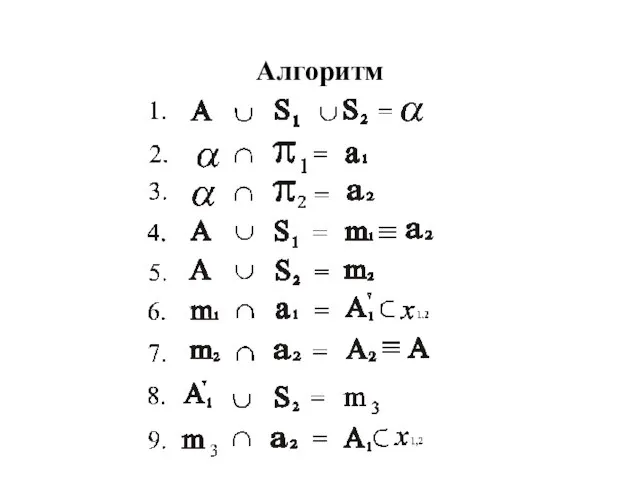
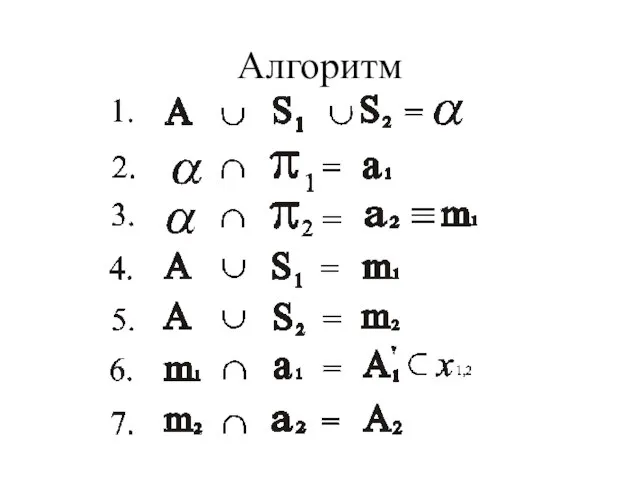
- 15. Алгоритм
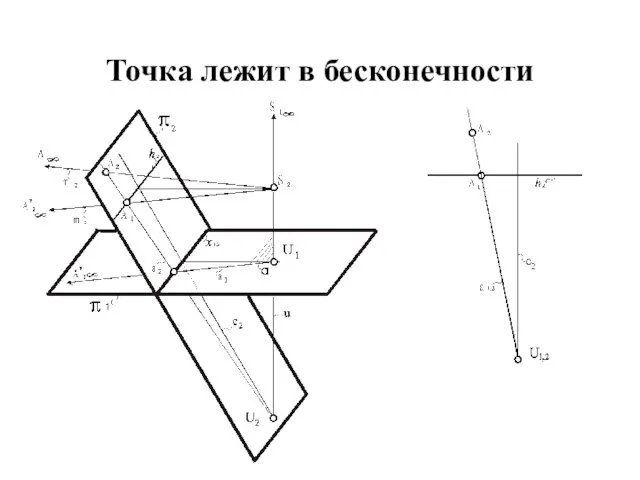
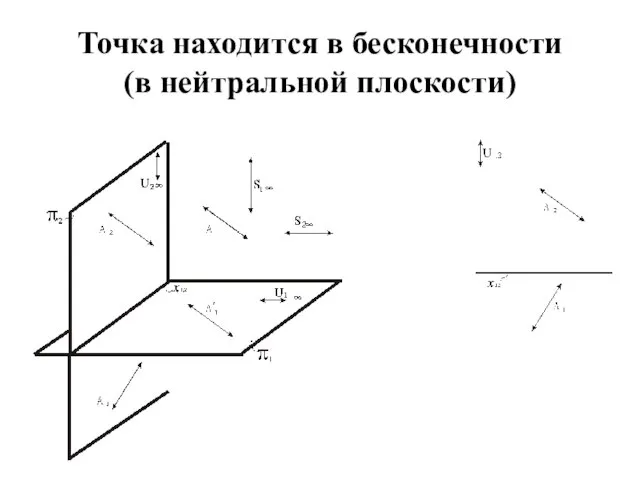
- 16. Точка лежит в бесконечности
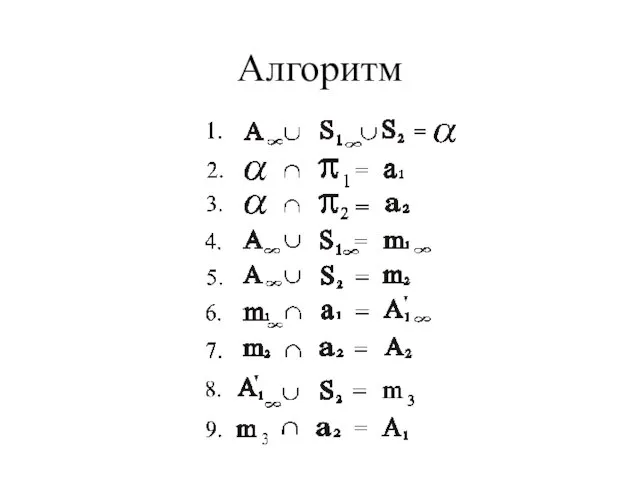
- 17. Алгоритм
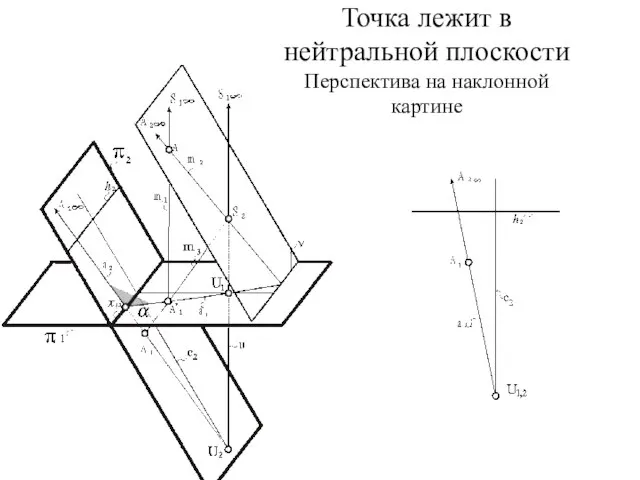
- 18. Точка лежит в нейтральной плоскости Перспектива на наклонной картине
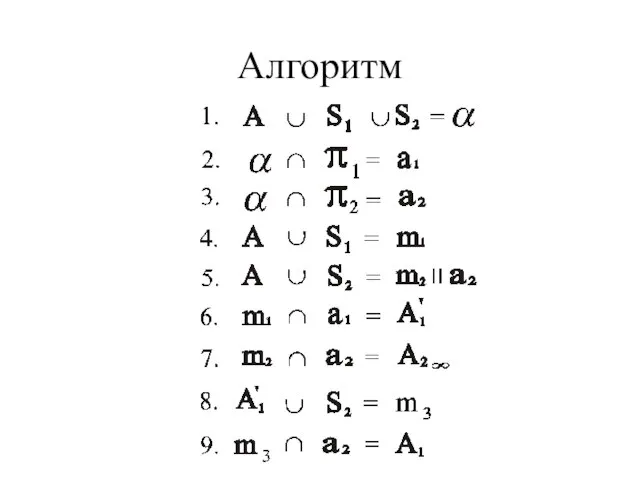
- 19. Алгоритм
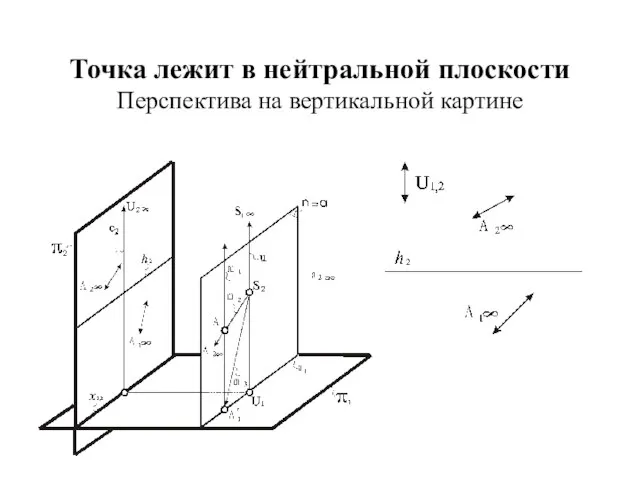
- 20. Точка лежит в нейтральной плоскости Перспектива на вертикальной картине
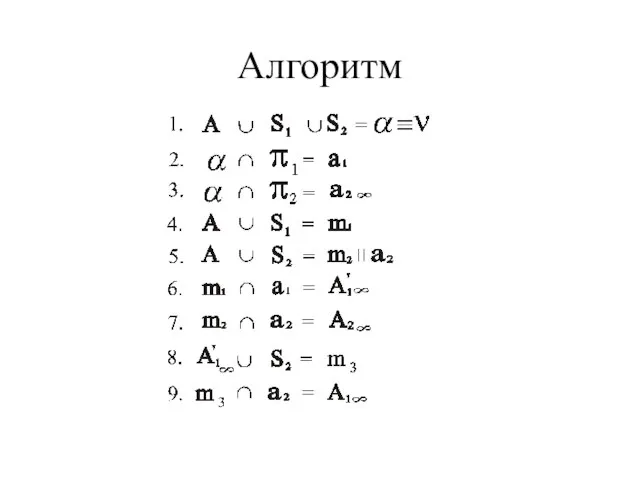
- 21. Алгоритм
- 22. Задача 1. Построение плоской модели точки трехмерного пространства Эпюр Монжа
- 23. Точка общего положения
- 24. Алгоритм
- 25. Модели точек частного положения Характерные признаки
- 26. Точка лежит в картине П1
- 27. Алгоритм
- 28. Точка принадлежит картине П2
- 29. Алгоритм
- 30. Точка находится в бесконечности (в нейтральной плоскости)
- 31. Алгоритм
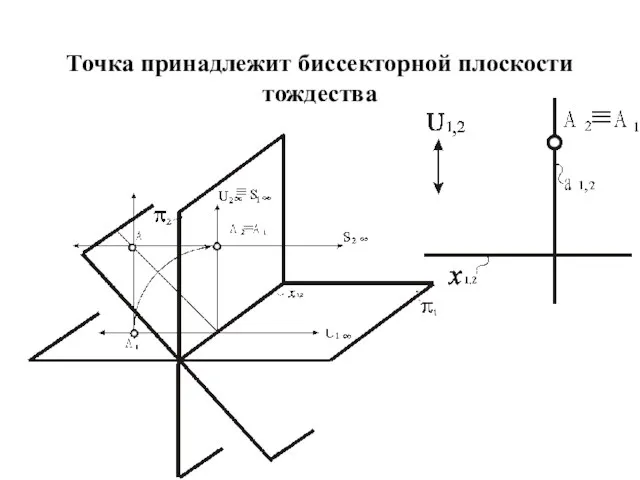
- 32. Точка принадлежит биссекторной плоскости тождества
- 34. Скачать презентацию
Слайд 3Структура проекционного аппарата
Структура проекционного аппарата
Слайд 4Алгоритм
A ∪ u =α – проецирующая плоскость;
α ∩ π1 = а1 –
Алгоритм
A ∪ u =α – проецирующая плоскость;
α ∩ π1 = а1 –
Слайд 5Модель точки трехмерного пространства, построенной методом двух изображений
-два ее изображения (проекции),
Модель точки трехмерного пространства, построенной методом двух изображений -два ее изображения (проекции),
Слайд 6КЛАССИФИКАЦИЯ
ТОЧЕК ТРЕХМЕРНОГО ПРОСТРАНСТВА
1. Точки частного положения
Точки принадлежащие картинам.
Бесконечно удаленные точки.
Точки,
КЛАССИФИКАЦИЯ
ТОЧЕК ТРЕХМЕРНОГО ПРОСТРАНСТВА
1. Точки частного положения
Точки принадлежащие картинам.
Бесконечно удаленные точки.
Точки,
Слайд 7Задача 1. Построение плоской модели точки трехмерного пространства
перспектива
Задача 1. Построение плоской модели точки трехмерного пространства
перспектива
Слайд 9Модель точки общего положения
Модель точки общего положения
Слайд 10Алгоритм
Алгоритм
Слайд 11Модели точек частного положения
Характерные признаки
Модели точек частного положения
Характерные признаки
Слайд 12Точка принадлежит картине П1
(плоскость тождества)
Точка принадлежит картине П1
(плоскость тождества)
Слайд 13Алгоритм
Алгоритм
Слайд 14Точка лежит в картине Π 2
Точка лежит в картине Π 2
Слайд 15Алгоритм
Алгоритм
Слайд 16Точка лежит в бесконечности
Точка лежит в бесконечности
Слайд 17Алгоритм
Алгоритм
Слайд 18Точка лежит в нейтральной плоскости
Перспектива на наклонной картине
Точка лежит в нейтральной плоскости
Перспектива на наклонной картине
Слайд 19Алгоритм
Алгоритм
Слайд 20Точка лежит в нейтральной плоскости
Перспектива на вертикальной картине
Точка лежит в нейтральной плоскости
Перспектива на вертикальной картине
Слайд 21Алгоритм
Алгоритм
Слайд 22Задача 1. Построение плоской модели точки трехмерного пространства
Эпюр Монжа
Задача 1. Построение плоской модели точки трехмерного пространства
Эпюр Монжа
Слайд 23Точка общего положения
Точка общего положения
Слайд 24Алгоритм
Алгоритм
Слайд 25Модели точек частного положения
Характерные признаки
Модели точек частного положения
Характерные признаки
Слайд 26Точка лежит в картине П1
Точка лежит в картине П1
Слайд 27Алгоритм
Алгоритм
Слайд 28Точка принадлежит картине П2
Точка принадлежит картине П2
Слайд 29Алгоритм
Алгоритм
Слайд 30Точка находится в бесконечности
(в нейтральной плоскости)
Точка находится в бесконечности
(в нейтральной плоскости)
Слайд 31Алгоритм
Алгоритм
Слайд 32Точка принадлежит биссекторной плоскости тождества
Точка принадлежит биссекторной плоскости тождества
 Интернет-технология комплектования электронных книжных фондов SwetsWise Ebooks
Интернет-технология комплектования электронных книжных фондов SwetsWise Ebooks Бородинская битва на страницах романа "Война и мир»
Бородинская битва на страницах романа "Война и мир» Своя игра
Своя игра Weddings
Weddings  Псалом 45. Бог прибежище нам и сила, поддержит в скорби, ожидающей нас
Псалом 45. Бог прибежище нам и сила, поддержит в скорби, ожидающей нас Морфологический анализ слова Задания А10,В2
Морфологический анализ слова Задания А10,В2 Крестины
Крестины Комплект программ для работы в офисе
Комплект программ для работы в офисе Хобби моей тёти. Техника Амигуруми
Хобби моей тёти. Техника Амигуруми Гвардеец
Гвардеец Византия
Византия Водородная связь
Водородная связь Студенческая жизнь. Знакомимся с историей техникума!
Студенческая жизнь. Знакомимся с историей техникума! Кот Леопольд и золотая рыбка
Кот Леопольд и золотая рыбка Ромовая баба
Ромовая баба Презентация на тему Растения и их классификация
Презентация на тему Растения и их классификация  Сколково - центр инноваций в архитектуре
Сколково - центр инноваций в архитектуре Минеральные цементы
Минеральные цементы Организация проектной деятельности младших школьников
Организация проектной деятельности младших школьников Наркомания и её вред на здоровье человека
Наркомания и её вред на здоровье человека MasterLink – Система под Ваши требования..…
MasterLink – Система под Ваши требования..… Строение и жизнедеятельность растительной клетки
Строение и жизнедеятельность растительной клетки Lektsia_1
Lektsia_1 Благотворительный фонд помощи пострадавшим в дорожно-транспортных происшествиях СтопДТП
Благотворительный фонд помощи пострадавшим в дорожно-транспортных происшествиях СтопДТП Практическая реализация методов ожижения. Конструкции ожижителей I
Практическая реализация методов ожижения. Конструкции ожижителей I Московская школа - школа больших возможностей
Московская школа - школа больших возможностей г. Зеленоград, 3-й микрорайон, корп. 322-322А. Карты правил землепользования и застройки: зоны и подзоны
г. Зеленоград, 3-й микрорайон, корп. 322-322А. Карты правил землепользования и застройки: зоны и подзоны Презентация на тему ЖИВОТНЫЕ ПРОШЛОГО
Презентация на тему ЖИВОТНЫЕ ПРОШЛОГО