- Разработка шагового электропривода на базе одноименно – полюсного индукторного двигателя

Содержание
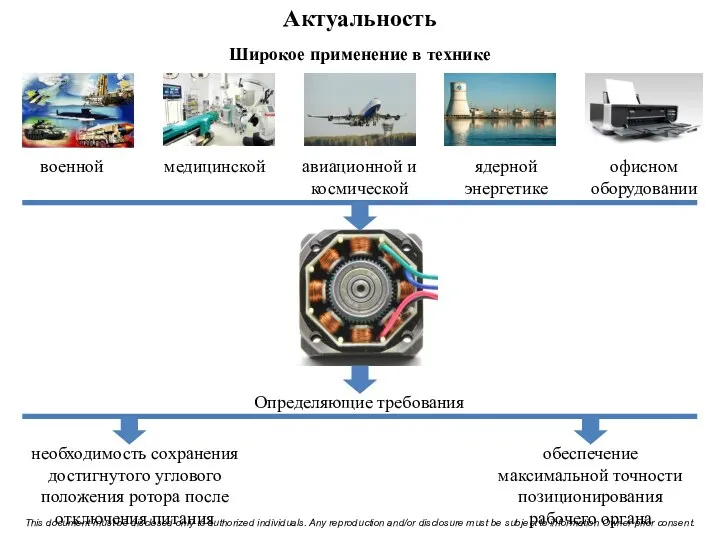
- 2. Актуальность Широкое применение в технике военной медицинской авиационной и космической ядерной энергетике офисном оборудовании Определяющие требования
- 3. Актуальность Проблемами теории, расчёта, проектирования и исследований электропривода на базе синхронных машин с постоянными магнитами для
- 4. Цель и задачи Объект исследования - Шаговый электропривод с одноимённо-полюсными индукторными двигателями с постоянными магнитами на
- 5. Цель и задачи Задачи: 1. Создание методики и алгоритма проектирования одноимённо-полюсных индукторных двигателей с постоянными магнитами
- 6. Научная новизна 1. Впервые разработана методика проектирования одноимённо-полюсных индукторных двигателей с учётом момента инерции подвижных масс
- 7. Практическая ценность Обоснование и разработка математических моделей, которые позволяют: 1. Выполнять проектирование одноимённо-полюсных индукторных двигателей с
- 8. На защиту выносятся: 1. Методика проектирования одноимённо-полюсного индукторного двигателя, в которой учитывается момент инерции подвижных масс
- 9. Актуальность
- 10. Актуальность
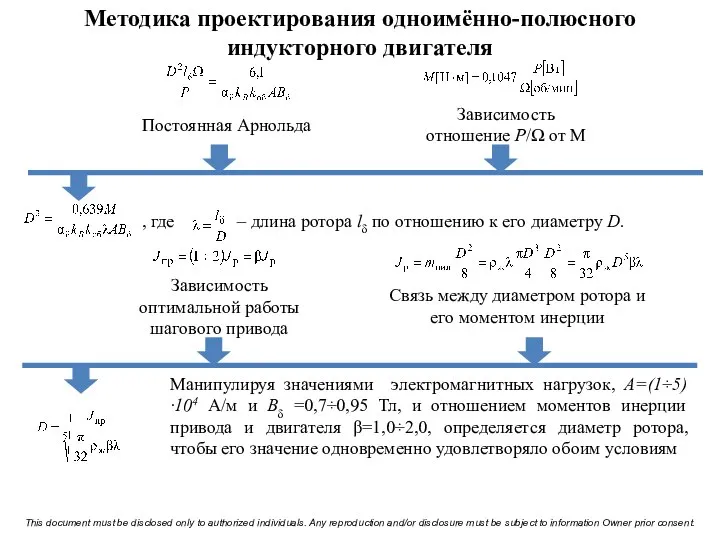
- 11. Методика проектирования одноимённо-полюсного индукторного двигателя Постоянная Арнольда Зависимость отношение P/Ω от М , где – длина
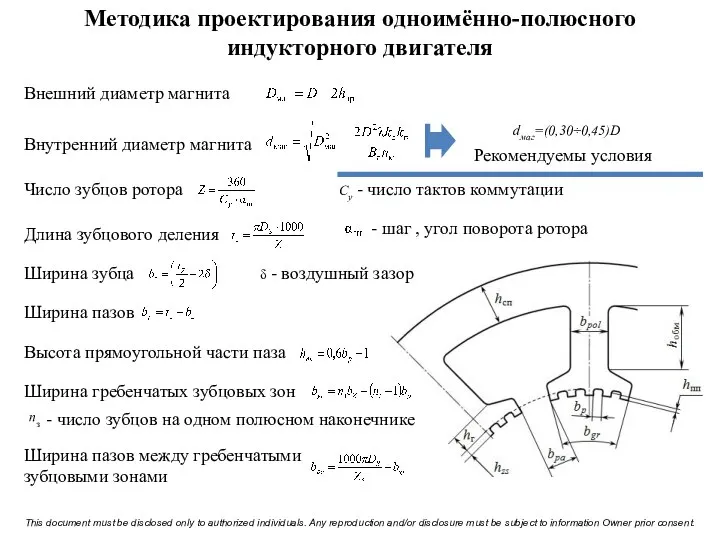
- 12. Методика проектирования одноимённо-полюсного индукторного двигателя Внешний диаметр магнита Внутренний диаметр магнита dмаг=(0,30÷0,45)D Рекомендуемы условия Ширина зубца
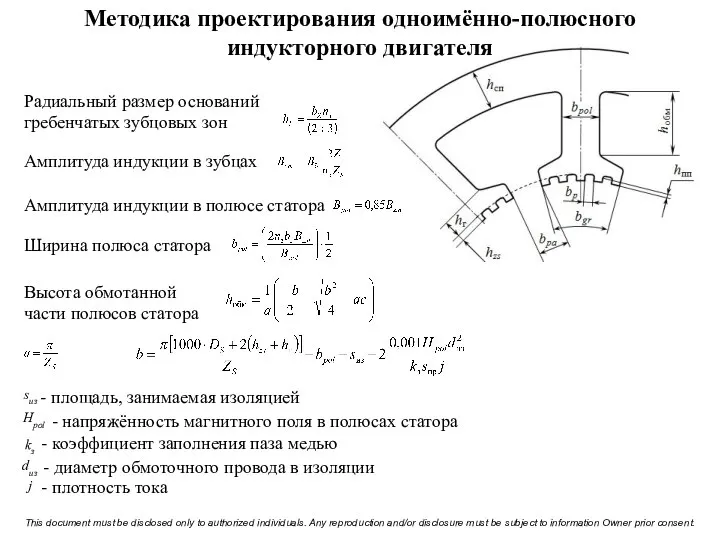
- 13. Методика проектирования одноимённо-полюсного индукторного двигателя Радиальный размер оснований гребенчатых зубцовых зон Амплитуда индукции в зубцах Амплитуда
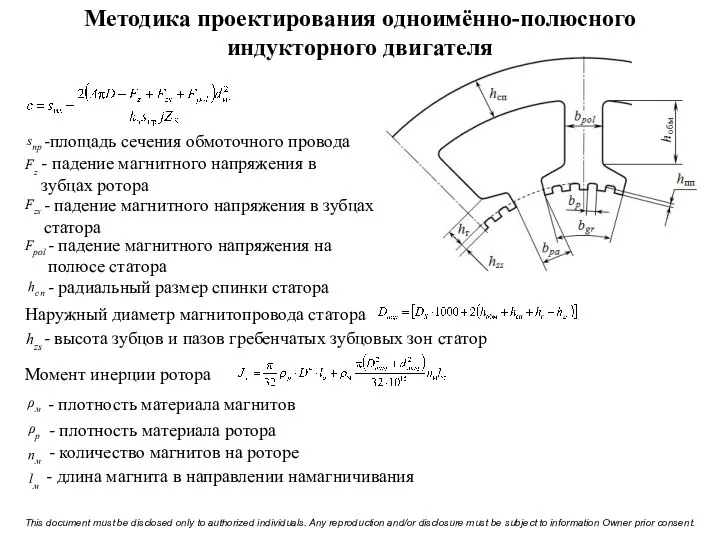
- 14. Методика проектирования одноимённо-полюсного индукторного двигателя sпр -площадь сечения обмоточного провода - падение магнитного напряжения в зубцах
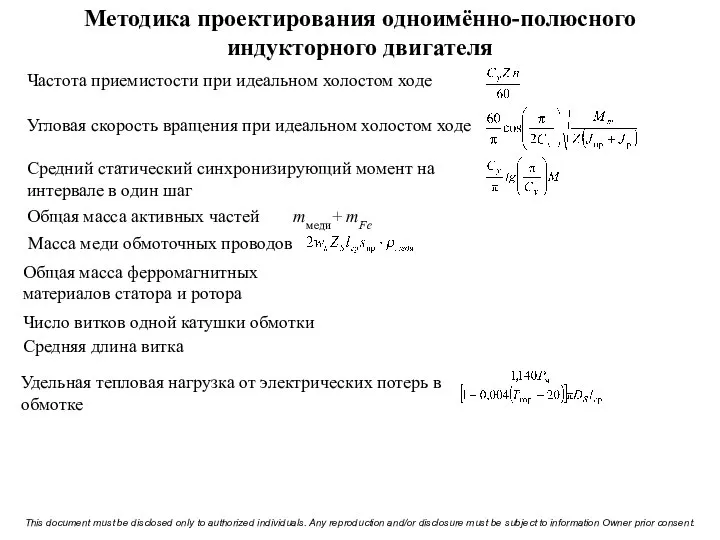
- 15. Методика проектирования одноимённо-полюсного индукторного двигателя Частота приемистости при идеальном холостом ходе Угловая скорость вращения при идеальном
- 16. Актуальность
- 17. Актуальность
- 18. Актуальность
- 19. Актуальность
- 20. Актуальность
- 21. Актуальность
- 22. Актуальность
- 23. Актуальность
- 24. Актуальность
- 25. Актуальность
- 26. Оптимизационные расчеты электродвигателей в составе шагового электропривода Целью оптимизации поставлено достижение одного из следующих результатов: -
- 27. Оптимизационные расчеты электродвигателей в составе шагового электропривода
- 28. Оптимизационные расчеты электродвигателей в составе шагового электропривода
- 29. Основные результаты работы 1. Разработаны методика и алгоритм проектирования одноимённо-полюсных индукторных электромеханических преобразователей (двигателей) индукторного типа
- 31. Скачать презентацию
Слайд 2Актуальность
Широкое применение в технике
военной
медицинской
авиационной и космической
ядерной энергетике
офисном оборудовании
Определяющие требования
необходимость сохранения достигнутого
Актуальность
Широкое применение в технике
военной
медицинской
авиационной и космической
ядерной энергетике
офисном оборудовании
Определяющие требования
необходимость сохранения достигнутого
Слайд 3Актуальность
Проблемами теории, расчёта, проектирования и исследований электропривода на базе синхронных машин с
Актуальность
Проблемами теории, расчёта, проектирования и исследований электропривода на базе синхронных машин с
Слайд 4Цель и задачи
Объект исследования -
Шаговый электропривод с одноимённо-полюсными индукторными двигателями с постоянными
Цель и задачи
Объект исследования -
Шаговый электропривод с одноимённо-полюсными индукторными двигателями с постоянными
Слайд 5Цель и задачи
Задачи:
1. Создание методики и алгоритма проектирования одноимённо-полюсных индукторных двигателей с
Цель и задачи
Задачи:
1. Создание методики и алгоритма проектирования одноимённо-полюсных индукторных двигателей с
Слайд 6Научная новизна
1. Впервые разработана методика проектирования одноимённо-полюсных индукторных двигателей с учётом момента
Научная новизна
1. Впервые разработана методика проектирования одноимённо-полюсных индукторных двигателей с учётом момента
Слайд 7Практическая ценность
Обоснование и разработка математических моделей, которые позволяют:
1. Выполнять проектирование одноимённо-полюсных индукторных
Практическая ценность
Обоснование и разработка математических моделей, которые позволяют:
1. Выполнять проектирование одноимённо-полюсных индукторных
Слайд 8На защиту выносятся:
1. Методика проектирования одноимённо-полюсного индукторного двигателя, в которой учитывается момент
На защиту выносятся:
1. Методика проектирования одноимённо-полюсного индукторного двигателя, в которой учитывается момент
Слайд 9Актуальность
Актуальность
Слайд 10Актуальность
Актуальность
Слайд 11Методика проектирования одноимённо-полюсного индукторного двигателя
Постоянная Арнольда
Зависимость отношение P/Ω от М
, где
–
Методика проектирования одноимённо-полюсного индукторного двигателя
Постоянная Арнольда
Зависимость отношение P/Ω от М
, где
–
Слайд 12Методика проектирования одноимённо-полюсного индукторного двигателя
Внешний диаметр магнита
Внутренний диаметр магнита
dмаг=(0,30÷0,45)D
Рекомендуемы условия
Ширина зубца
Число зубцов
Методика проектирования одноимённо-полюсного индукторного двигателя
Внешний диаметр магнита
Внутренний диаметр магнита
dмаг=(0,30÷0,45)D
Рекомендуемы условия
Ширина зубца
Число зубцов
Слайд 13Методика проектирования одноимённо-полюсного индукторного двигателя
Радиальный размер оснований гребенчатых зубцовых зон
Амплитуда индукции в
Методика проектирования одноимённо-полюсного индукторного двигателя
Радиальный размер оснований гребенчатых зубцовых зон
Амплитуда индукции в
Слайд 14Методика проектирования одноимённо-полюсного индукторного двигателя
sпр
-площадь сечения обмоточного провода
- падение магнитного напряжения в
Методика проектирования одноимённо-полюсного индукторного двигателя
sпр
-площадь сечения обмоточного провода
- падение магнитного напряжения в
Слайд 15Методика проектирования одноимённо-полюсного индукторного двигателя
Частота приемистости при идеальном холостом ходе
Угловая скорость вращения
Методика проектирования одноимённо-полюсного индукторного двигателя
Частота приемистости при идеальном холостом ходе
Угловая скорость вращения
Слайд 16Актуальность
Актуальность
Слайд 17Актуальность
Актуальность
Слайд 18Актуальность
Актуальность
Слайд 19Актуальность
Актуальность
Слайд 20Актуальность
Актуальность
Слайд 21Актуальность
Актуальность
Слайд 22Актуальность
Актуальность
Слайд 23Актуальность
Актуальность
Слайд 24Актуальность
Актуальность
Слайд 25Актуальность
Актуальность
Слайд 26Оптимизационные расчеты электродвигателей в составе шагового электропривода
Целью оптимизации поставлено достижение одного из
Оптимизационные расчеты электродвигателей в составе шагового электропривода
Целью оптимизации поставлено достижение одного из
Слайд 27Оптимизационные расчеты электродвигателей в составе шагового электропривода
Оптимизационные расчеты электродвигателей в составе шагового электропривода
Слайд 28Оптимизационные расчеты электродвигателей в составе шагового электропривода
Оптимизационные расчеты электродвигателей в составе шагового электропривода
Слайд 29Основные результаты работы
1. Разработаны методика и алгоритм проектирования одноимённо-полюсных индукторных электромеханических преобразователей
Основные результаты работы
1. Разработаны методика и алгоритм проектирования одноимённо-полюсных индукторных электромеханических преобразователей
 Декоративная композиция
Декоративная композиция Теория издержек и прибыли
Теория издержек и прибыли Коммуникативная стратегия как инструмент развития банковского бизнеса на региональном уровне
Коммуникативная стратегия как инструмент развития банковского бизнеса на региональном уровне Школа на окраине
Школа на окраине Правильные и полуправильные многогранники
Правильные и полуправильные многогранники Шаблон презентации Школьный акселератор
Шаблон презентации Школьный акселератор Что такое кровь?
Что такое кровь? Начало Реформации в Европе. Обновление христианства.
Начало Реформации в Европе. Обновление христианства. Комиссии по соблюдению требований к служебному поведению гражданских служащих и урегулированию конфликта интересов
Комиссии по соблюдению требований к служебному поведению гражданских служащих и урегулированию конфликта интересов Дигибридное скрещивание
Дигибридное скрещивание 1
1 Тема:
Тема: Владимир Александрович Галкин
Владимир Александрович Галкин Коммерческое предложение для ООО Тверьнефтепродукт
Коммерческое предложение для ООО Тверьнефтепродукт Защищённый грунт
Защищённый грунт Презентация на тему Электрический ток в различных средах
Презентация на тему Электрический ток в различных средах Презентация на тему Новгородская республика (6 класс)
Презентация на тему Новгородская республика (6 класс) Соха и топор
Соха и топор Titanpad упутствоwww.titanpad.com
Titanpad упутствоwww.titanpad.com Один шаг на пути к успеху
Один шаг на пути к успеху The Germanic languages Alphabets, Vocabulary and semantics
The Germanic languages Alphabets, Vocabulary and semantics e
e Системно-векторная психология
Системно-векторная психология Действия с обыкновенными дробями
Действия с обыкновенными дробями Презентация Трудовые ресурсы, персонал организации
Презентация Трудовые ресурсы, персонал организации Организатор питания
Организатор питания Процессор. Микропроцессор
Процессор. Микропроцессор Основы безопасности информационных систем
Основы безопасности информационных систем