- ТЕХНОЛОГИИ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА

Содержание
- 2. КИИ 2010 О чем эта работа Рассматривается реализация механизма эмоций мобильного робота на базе гибридной нейро-продукционной
- 3. КИИ 2010 Эмоции в ИИ Роль эмоций в процессе рассуждений, наличие эмоциональных правил - [Поспелов, 1989]
- 4. КИИ 2010 Эмоции в робототехнике Основная задача исследований в этом направлении - создание эффективного человеко-машинного интерфейса,
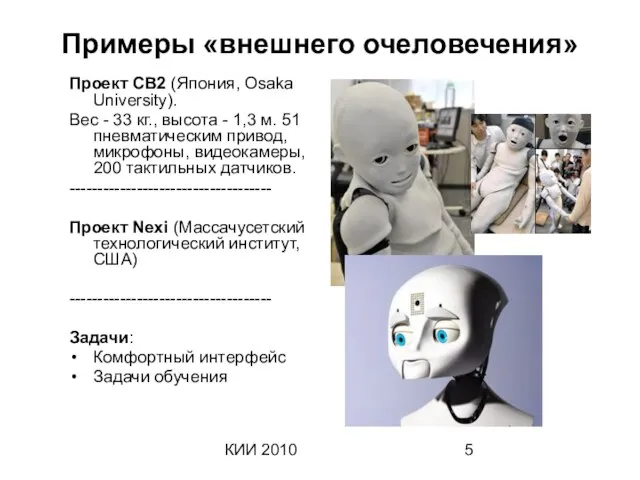
- 5. КИИ 2010 Примеры «внешнего очеловечения» Проект CB2 (Япония, Osaka University). Вес - 33 кг., высота -
- 6. КИИ 2010 Эмоции в робототехнике и ИИ Несколько утрируя, можно сделать вывод о том, что ИИ
- 7. КИИ 2010 Эмоции Эмоции (emovere – возбуждать, волновать) – состояния, связанные с субъективной оценкой значимости для
- 8. КИИ 2010 Теории эмоций Практически все теории Э сводятся к тому, что эмоциональное чувство возникает в
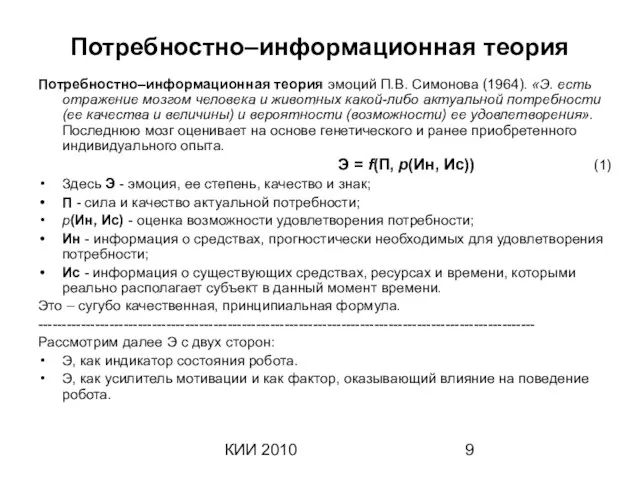
- 9. КИИ 2010 Потребностно–информационная теория Потребностно–информационная теория эмоций П.В. Симонова (1964). «Э. есть отражение мозгом человека и
- 10. КИИ 2010 Задача Мобильный робот и среда его обитания – полигон. Препятствия, зеленые («корм») и темные
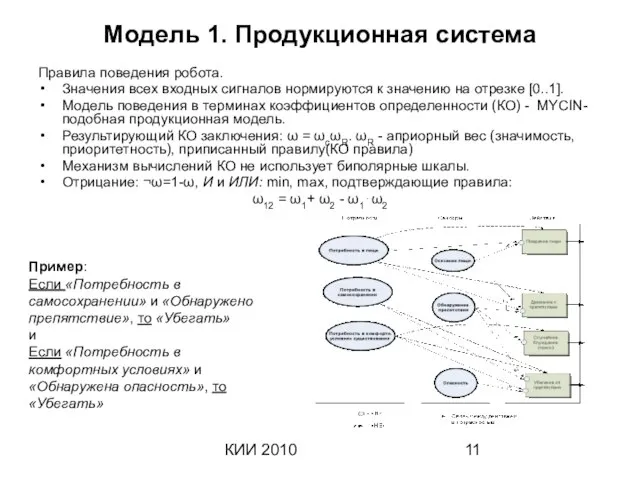
- 11. КИИ 2010 Модель 1. Продукционная система Правила поведения робота. Значения всех входных сигналов нормируются к значению
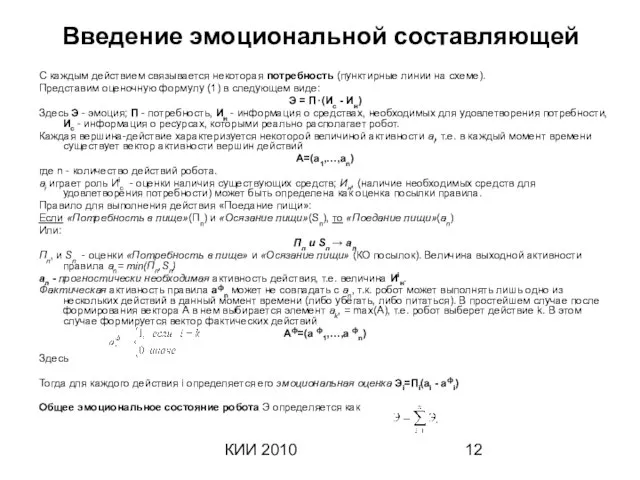
- 12. КИИ 2010 Введение эмоциональной составляющей С каждым действием связывается некоторая потребность (пунктирные линии на схеме). Представим
- 13. КИИ 2010 Вывод 1 Здесь Э действительно относятся ко всей текущей ситуации в целом. Величины Эi
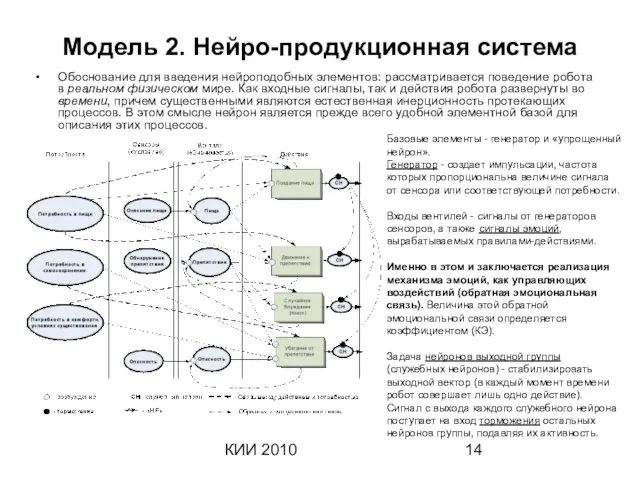
- 14. КИИ 2010 Модель 2. Нейро-продукционная система Обоснование для введения нейроподобных элементов: рассматривается поведение робота в реальном
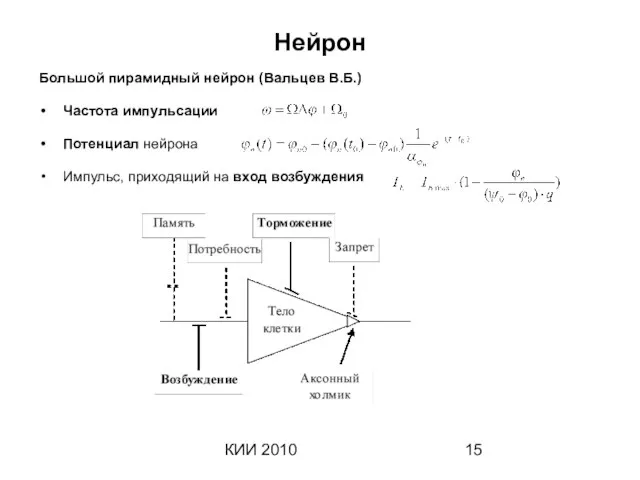
- 15. КИИ 2010 Нейрон Большой пирамидный нейрон (Вальцев В.Б.) Частота импульсации Потенциал нейрона Импульс, приходящий на вход
- 16. КИИ 2010 Эксперименты. Преамбула 1 Некоторые аспекты эмоций с точки зрения психологии: отражательно-оценочная роль эмоций (средство
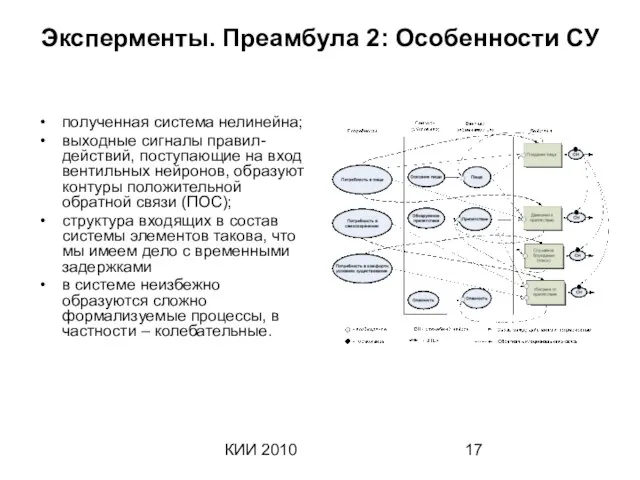
- 17. КИИ 2010 Эксперменты. Преамбула 2: Особенности СУ полученная система нелинейна; выходные сигналы правил-действий, поступающие на вход
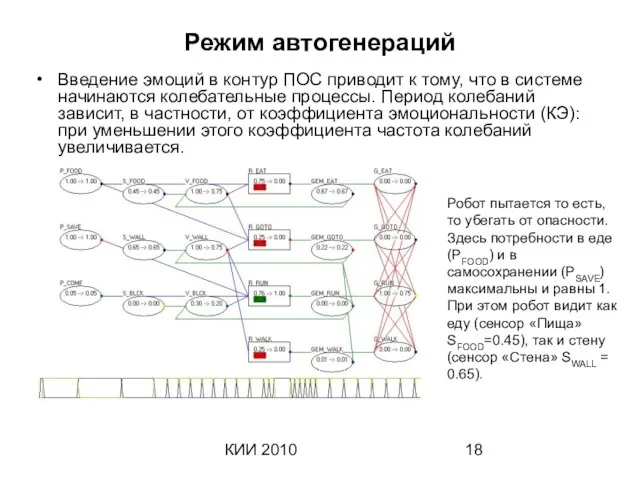
- 18. КИИ 2010 Режим автогенераций Введение эмоций в контур ПОС приводит к тому, что в системе начинаются
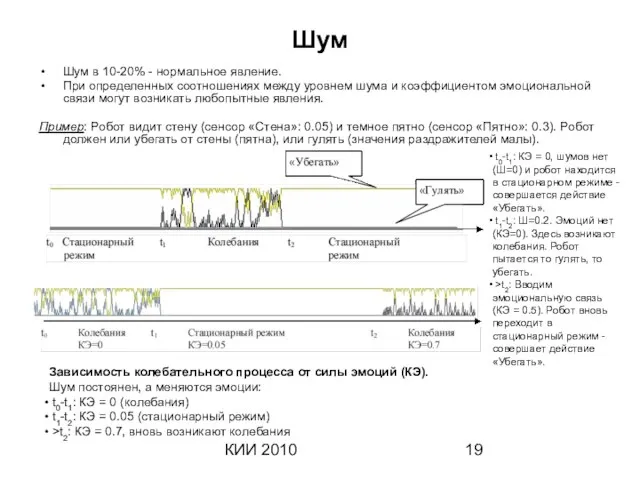
- 19. КИИ 2010 Шум Шум в 10-20% - нормальное явление. При определенных соотношениях между уровнем шума и
- 20. КИИ 2010 Режим насыщения и «встряхивание» сети Наличие ПОС приводит к тому, что элементы начинают работать
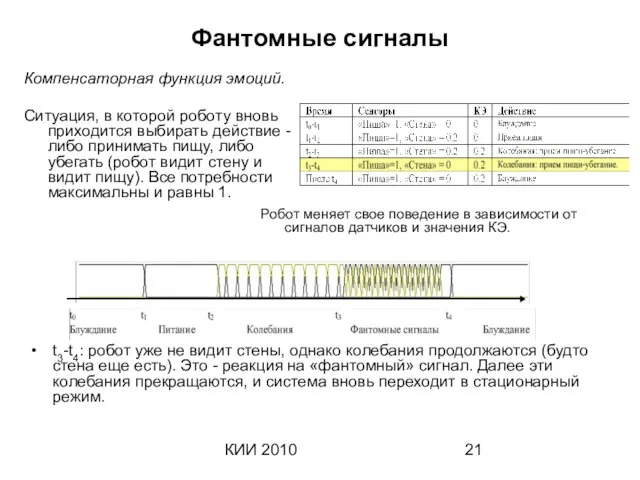
- 21. КИИ 2010 Фантомные сигналы Компенсаторная функция эмоций. Ситуация, в которой роботу вновь приходится выбирать действие -
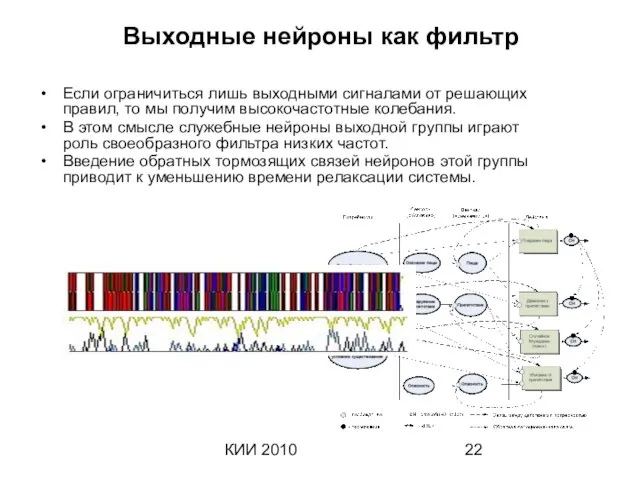
- 22. КИИ 2010 Выходные нейроны как фильтр Если ограничиться лишь выходными сигналами от решающих правил, то мы
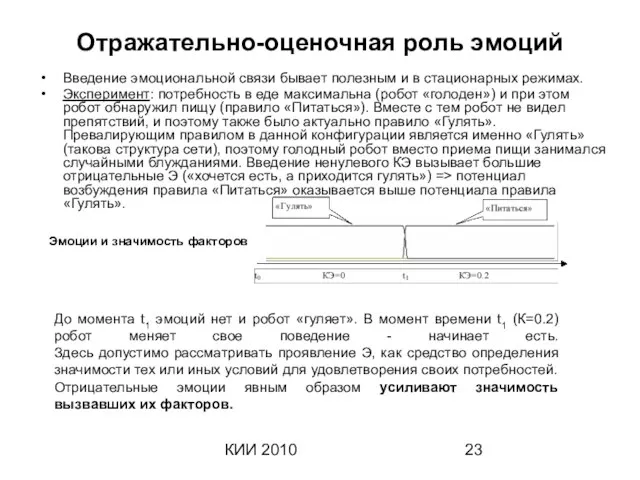
- 23. КИИ 2010 Отражательно-оценочная роль эмоций Введение эмоциональной связи бывает полезным и в стационарных режимах. Эксперимент: потребность
- 24. КИИ 2010 Заключение Целью работы вовсе не являлось вскрытие механизма эмоций, его формализация и т.п. Речь
- 25. КИИ 2010 Заключительные замечания 1 Виды эмоций. В работе все многообразие Э было сведено к двум
- 26. КИИ 2010 Заключительные замечания 2 Сложность демонстрации. Длительные наблюдения. Проще наблюдать внутренний мир, а не внешнее
- 28. Скачать презентацию
Слайд 2КИИ 2010
О чем эта работа
Рассматривается реализация механизма эмоций мобильного робота на базе
КИИ 2010
О чем эта работа
Рассматривается реализация механизма эмоций мобильного робота на базе
Слайд 3КИИ 2010
Эмоции в ИИ
Роль эмоций в процессе рассуждений, наличие эмоциональных правил -
КИИ 2010
Эмоции в ИИ
Роль эмоций в процессе рассуждений, наличие эмоциональных правил -
Слайд 4КИИ 2010
Эмоции в робототехнике
Основная задача исследований в этом направлении - создание эффективного
КИИ 2010
Эмоции в робототехнике
Основная задача исследований в этом направлении - создание эффективного

Слайд 5КИИ 2010
Примеры «внешнего очеловечения»
Проект CB2 (Япония, Osaka University).
Вес - 33 кг., высота
КИИ 2010
Примеры «внешнего очеловечения»
Проект CB2 (Япония, Osaka University).
Вес - 33 кг., высота
Слайд 6КИИ 2010
Эмоции в робототехнике и ИИ
Несколько утрируя, можно сделать вывод о том,
КИИ 2010
Эмоции в робототехнике и ИИ
Несколько утрируя, можно сделать вывод о том,
Слайд 7КИИ 2010
Эмоции
Эмоции (emovere – возбуждать, волновать) – состояния, связанные с субъективной оценкой
КИИ 2010
Эмоции
Эмоции (emovere – возбуждать, волновать) – состояния, связанные с субъективной оценкой
Слайд 8КИИ 2010
Теории эмоций
Практически все теории Э сводятся к тому, что эмоциональное чувство
КИИ 2010
Теории эмоций
Практически все теории Э сводятся к тому, что эмоциональное чувство
Слайд 9КИИ 2010
Потребностно–информационная теория
Потребностно–информационная теория эмоций П.В. Симонова (1964). «Э. есть отражение мозгом человека
КИИ 2010
Потребностно–информационная теория
Потребностно–информационная теория эмоций П.В. Симонова (1964). «Э. есть отражение мозгом человека
Слайд 10КИИ 2010
Задача
Мобильный робот и среда его обитания – полигон. Препятствия, зеленые
КИИ 2010
Задача
Мобильный робот и среда его обитания – полигон. Препятствия, зеленые

Слайд 11КИИ 2010
Модель 1. Продукционная система
Правила поведения робота.
Значения всех входных сигналов нормируются
КИИ 2010
Модель 1. Продукционная система
Правила поведения робота.
Значения всех входных сигналов нормируются
Слайд 12КИИ 2010
Введение эмоциональной составляющей
С каждым действием связывается некоторая потребность (пунктирные линии
КИИ 2010
Введение эмоциональной составляющей
С каждым действием связывается некоторая потребность (пунктирные линии
Слайд 13КИИ 2010
Вывод 1
Здесь Э действительно относятся ко всей текущей ситуации в целом.
Величины
КИИ 2010
Вывод 1
Здесь Э действительно относятся ко всей текущей ситуации в целом.
Величины
Слайд 14КИИ 2010
Модель 2. Нейро-продукционная система
Обоснование для введения нейроподобных элементов: рассматривается поведение
КИИ 2010
Модель 2. Нейро-продукционная система
Обоснование для введения нейроподобных элементов: рассматривается поведение
Слайд 15КИИ 2010
Нейрон
Большой пирамидный нейрон (Вальцев В.Б.)
Частота импульсации
Потенциал нейрона
Импульс, приходящий на
КИИ 2010
Нейрон
Большой пирамидный нейрон (Вальцев В.Б.)
Частота импульсации
Потенциал нейрона
Импульс, приходящий на
Слайд 16КИИ 2010
Эксперименты. Преамбула 1
Некоторые аспекты эмоций с точки зрения психологии:
отражательно-оценочная роль эмоций
КИИ 2010
Эксперименты. Преамбула 1
Некоторые аспекты эмоций с точки зрения психологии:
отражательно-оценочная роль эмоций
Слайд 17КИИ 2010
Эксперменты. Преамбула 2: Особенности СУ
полученная система нелинейна;
выходные сигналы правил-действий, поступающие на
КИИ 2010
Эксперменты. Преамбула 2: Особенности СУ
полученная система нелинейна;
выходные сигналы правил-действий, поступающие на
Слайд 18КИИ 2010
Режим автогенераций
Введение эмоций в контур ПОС приводит к тому, что в
КИИ 2010
Режим автогенераций
Введение эмоций в контур ПОС приводит к тому, что в
Слайд 19КИИ 2010
Шум
Шум в 10-20% - нормальное явление.
При определенных соотношениях между уровнем
КИИ 2010
Шум
Шум в 10-20% - нормальное явление.
При определенных соотношениях между уровнем
Слайд 20КИИ 2010
Режим насыщения и «встряхивание» сети
Наличие ПОС приводит к тому, что
КИИ 2010
Режим насыщения и «встряхивание» сети
Наличие ПОС приводит к тому, что
Слайд 21КИИ 2010
Фантомные сигналы
Компенсаторная функция эмоций.
Ситуация, в которой роботу вновь приходится выбирать
КИИ 2010
Фантомные сигналы
Компенсаторная функция эмоций.
Ситуация, в которой роботу вновь приходится выбирать
Слайд 22КИИ 2010
Выходные нейроны как фильтр
Если ограничиться лишь выходными сигналами от решающих правил,
КИИ 2010
Выходные нейроны как фильтр
Если ограничиться лишь выходными сигналами от решающих правил,
Слайд 23КИИ 2010
Отражательно-оценочная роль эмоций
Введение эмоциональной связи бывает полезным и в стационарных
КИИ 2010
Отражательно-оценочная роль эмоций
Введение эмоциональной связи бывает полезным и в стационарных
Слайд 24КИИ 2010
Заключение
Целью работы вовсе не являлось вскрытие механизма эмоций, его формализация и
КИИ 2010
Заключение
Целью работы вовсе не являлось вскрытие механизма эмоций, его формализация и
Слайд 25КИИ 2010
Заключительные замечания 1
Виды эмоций. В работе все многообразие Э было сведено
КИИ 2010
Заключительные замечания 1
Виды эмоций. В работе все многообразие Э было сведено
Слайд 26КИИ 2010
Заключительные замечания 2
Сложность демонстрации. Длительные наблюдения. Проще наблюдать внутренний мир, а
КИИ 2010
Заключительные замечания 2
Сложность демонстрации. Длительные наблюдения. Проще наблюдать внутренний мир, а

 The manager and his functions
The manager and his functions Прыжки в длину с разбега
Прыжки в длину с разбега место клиентского сервиса
место клиентского сервиса Как использовать данные бенчмаркинга Trainings INDEX для создания и защиты бюджета
Как использовать данные бенчмаркинга Trainings INDEX для создания и защиты бюджета Финляндия. Финский дизайн. Известные финские бренды
Финляндия. Финский дизайн. Известные финские бренды Общий вид отчета в виде графической схемы объекта в разрезе этажей
Общий вид отчета в виде графической схемы объекта в разрезе этажей Система антикризисного управления на предприятии
Система антикризисного управления на предприятии Ситуационный план трассы
Ситуационный план трассы Алгоритм ведения работы по контракту на оказание услуг по организации питания и обеспечению питьевого режима обучающихся
Алгоритм ведения работы по контракту на оказание услуг по организации питания и обеспечению питьевого режима обучающихся Жемчуг
Жемчуг Почему выгодно быть экспертом на Butik2.ru
Почему выгодно быть экспертом на Butik2.ru Проблема технологических аварий
Проблема технологических аварий Контрактная система Тульской области
Контрактная система Тульской области Понятие и механизм правового регулирования. Юридическая ответственность. (Раздел 1)
Понятие и механизм правового регулирования. Юридическая ответственность. (Раздел 1) Мастер-класс Собачка из кругов
Мастер-класс Собачка из кругов Основные закономерности механики грунтов
Основные закономерности механики грунтов (010)Toolfaces
(010)Toolfaces British Wedding Customs and Superstitions:
British Wedding Customs and Superstitions: Пифагор. За легендой - Истина
Пифагор. За легендой - Истина Урок-викторина по сказкам А. С. Пушкина
Урок-викторина по сказкам А. С. Пушкина Башкиры
Башкиры Учреждение детский сад №7 Колокольчик, г.о. Красногорск, пос. Архангельское
Учреждение детский сад №7 Колокольчик, г.о. Красногорск, пос. Архангельское Работа над сочинением-рассуждением, связанным с анализом текста
Работа над сочинением-рассуждением, связанным с анализом текста VEEN Waters Finland Oy • Название: VEEN Waters Finland Oy• Год основания: 2007• Кол-во сотрудников: 4-5• Месторасположе
VEEN Waters Finland Oy • Название: VEEN Waters Finland Oy• Год основания: 2007• Кол-во сотрудников: 4-5• Месторасположе Прайсы_01.09.22_Школа программирования (2)
Прайсы_01.09.22_Школа программирования (2) Применение метода Гризайль
Применение метода Гризайль Храмы Кубани
Храмы Кубани Природные бедствия (Disaster)
Природные бедствия (Disaster)