- Жидкокристаллический эластомер как роторный актуатор

Содержание
- 2. Жидкокристаллические эластомеры Нематический порядок в жидких кристаллах Изотропная фаза Нематическая фаза n + полимеризация Внешний стимул
- 3. LCE актуаторы Теплом Актуация может быть вызвана: Светом Serak et al., Soft Matter 6, 779-783 (2010)
- 4. DEA роторный микромотор Структура DEA роторного микромотора Схема работы DEA роторного микромотора Imboden, Ji et al.
- 5. Мотор Икеды Ikeda et al. Angew. Chem., 120, 5064 –5066 (2008) Конструкция мотора: Мотор представляет собой
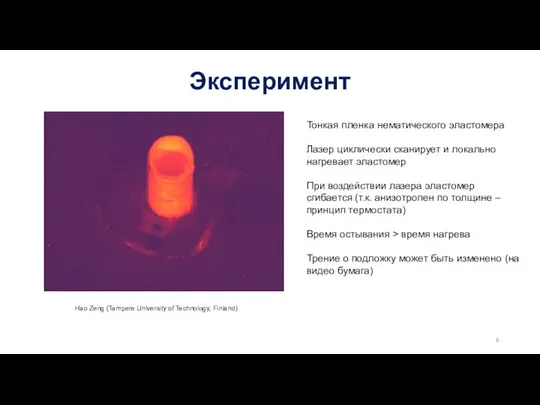
- 6. Эксперимент Тонкая пленка нематического эластомера Лазер циклически сканирует и локально нагревает эластомер При воздействии лазера эластомер
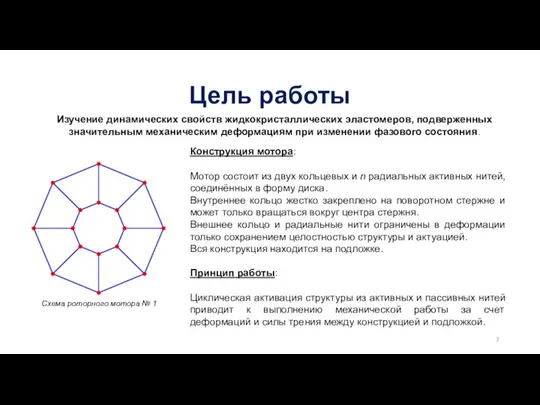
- 7. Цель работы Схема роторного мотора № 1 Изучение динамических свойств жидкокристаллических эластомеров, подверженных значительным механическим деформациям
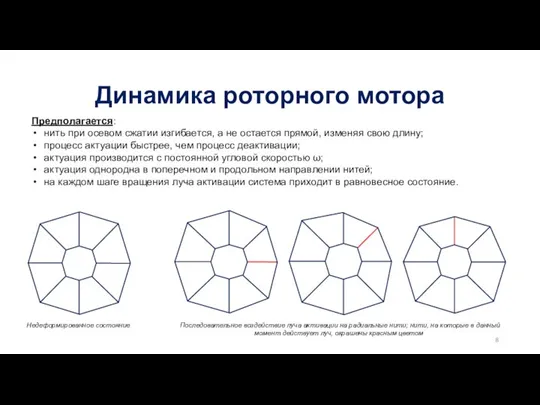
- 8. Динамика роторного мотора Предполагается: нить при осевом сжатии изгибается, а не остается прямой, изменяя свою длину;
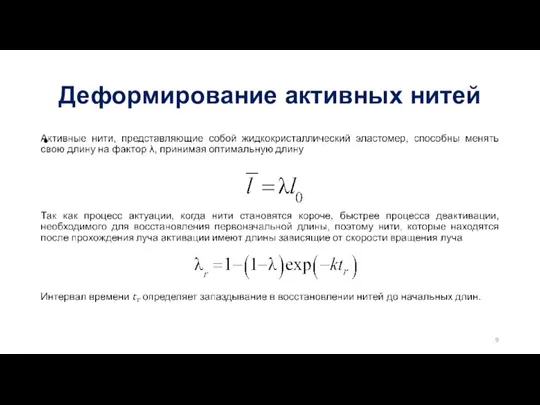
- 9. Деформирование активных нитей
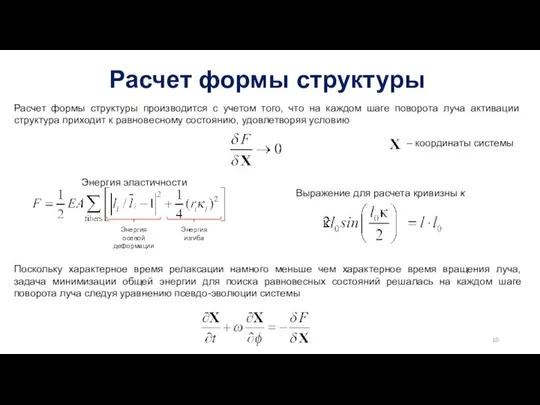
- 10. Расчет формы структуры Расчет формы структуры производится с учетом того, что на каждом шаге поворота луча
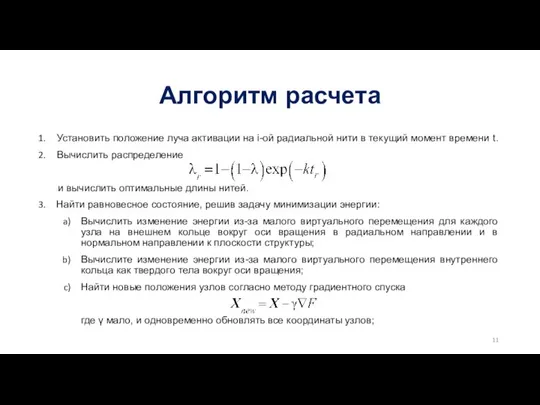
- 11. Алгоритм расчета Установить положение луча активации на i-ой радиальной нити в текущий момент времени t. Вычислить
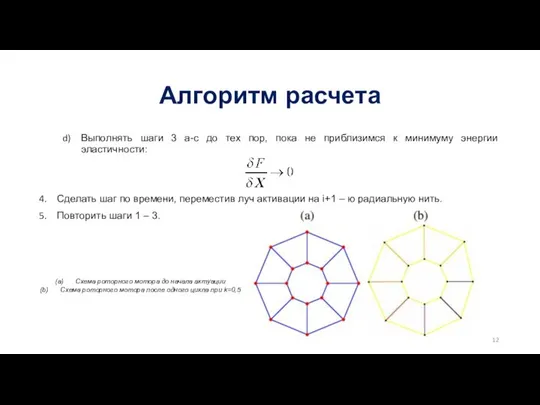
- 12. Алгоритм расчета Выполнять шаги 3 а-с до тех пор, пока не приблизимся к минимуму энергии эластичности:
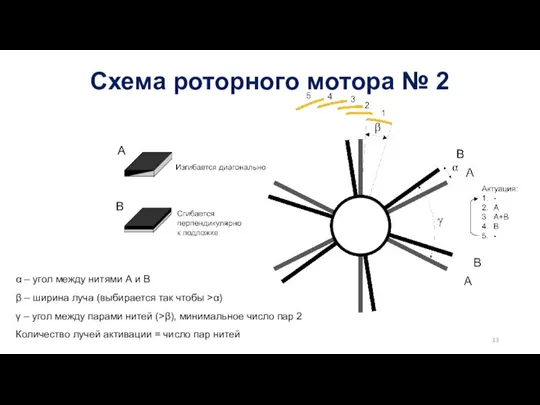
- 13. Схема роторного мотора № 2 α – угол между нитями А и В β – ширина
- 15. Скачать презентацию
Слайд 2Жидкокристаллические эластомеры
Нематический порядок в жидких кристаллах
Изотропная фаза
Нематическая фаза
n
+ полимеризация
Внешний стимул
Температура
Свет
Электрическое поле
Растворитель
Фазовый переход
Продольная
Боковая
Продольная
Жидкокристаллические эластомеры
Нематический порядок в жидких кристаллах
Изотропная фаза
Нематическая фаза
n
+ полимеризация
Внешний стимул
Температура
Свет
Электрическое поле
Растворитель
Фазовый переход
Продольная
Боковая
Продольная

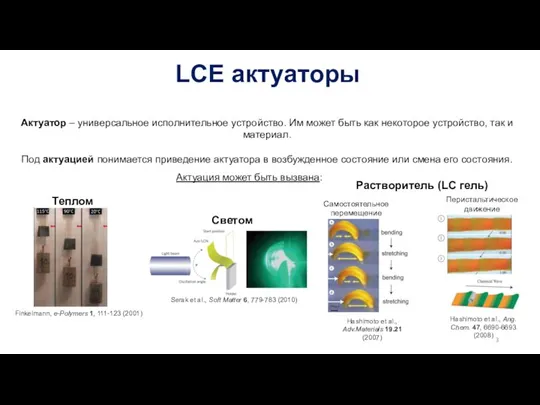
Слайд 3LCE актуаторы
Теплом
Актуация может быть вызвана:
Светом
Serak et al., Soft Matter 6, 779-783 (2010)
Растворитель (LC гель)
Hashimoto
LCE актуаторы
Теплом
Актуация может быть вызвана:
Светом
Serak et al., Soft Matter 6, 779-783 (2010)
Растворитель (LC гель)
Hashimoto
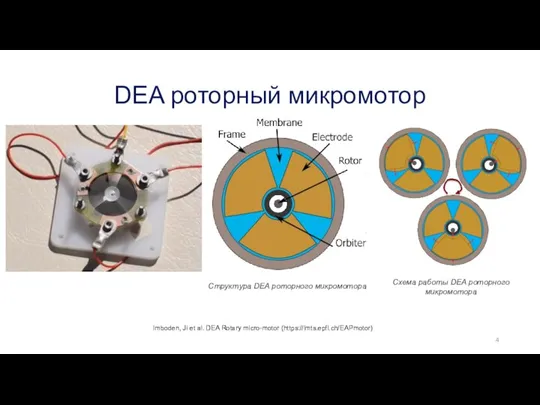
Слайд 4DEA роторный микромотор
Структура DEA роторного микромотора
Схема работы DEA роторного микромотора
Imboden, Ji et
DEA роторный микромотор
Структура DEA роторного микромотора
Схема работы DEA роторного микромотора
Imboden, Ji et
Слайд 5Мотор Икеды
Ikeda et al. Angew. Chem., 120, 5064 –5066 (2008)
Конструкция мотора:
Мотор
Мотор Икеды
Ikeda et al. Angew. Chem., 120, 5064 –5066 (2008)
Конструкция мотора:
Мотор

Слайд 6Эксперимент
Тонкая пленка нематического эластомера
Лазер циклически сканирует и локально нагревает эластомер
При воздействии
Эксперимент
Тонкая пленка нематического эластомера
Лазер циклически сканирует и локально нагревает эластомер
При воздействии
Слайд 7Цель работы
Схема роторного мотора № 1
Изучение динамических свойств жидкокристаллических эластомеров, подверженных значительным
Цель работы
Схема роторного мотора № 1
Изучение динамических свойств жидкокристаллических эластомеров, подверженных значительным
Слайд 8Динамика роторного мотора
Предполагается:
нить при осевом сжатии изгибается, а не остается прямой, изменяя
Динамика роторного мотора
Предполагается:
нить при осевом сжатии изгибается, а не остается прямой, изменяя
Слайд 9Деформирование активных нитей
Деформирование активных нитей
Слайд 10Расчет формы структуры
Расчет формы структуры производится с учетом того, что на каждом
Расчет формы структуры
Расчет формы структуры производится с учетом того, что на каждом
Слайд 11Алгоритм расчета
Установить положение луча активации на i-ой радиальной нити в текущий момент
Алгоритм расчета
Установить положение луча активации на i-ой радиальной нити в текущий момент
Слайд 12Алгоритм расчета
Выполнять шаги 3 а-с до тех пор, пока не приблизимся к
Алгоритм расчета
Выполнять шаги 3 а-с до тех пор, пока не приблизимся к
Слайд 13Схема роторного мотора № 2
α – угол между нитями А и В
β
Схема роторного мотора № 2
α – угол между нитями А и В
β
 Степень окисления
Степень окисления Алканы. Получение и применение
Алканы. Получение и применение Использование информационных технологий в образовательном процессе на примере химии
Использование информационных технологий в образовательном процессе на примере химии Химия в жизни общества
Химия в жизни общества Классификация загрязняющих веществ по фазово-дисперсному составу
Классификация загрязняющих веществ по фазово-дисперсному составу Презентация на тему Железо и его соединения
Презентация на тему Железо и его соединения  Кальций в океане: кораллы и жемчуг. Кальций в строительстве: гипс и алебастр
Кальций в океане: кораллы и жемчуг. Кальций в строительстве: гипс и алебастр (+)-Plumisclerin A. Плюмисклин А
(+)-Plumisclerin A. Плюмисклин А Интрузивные контакты. Контакты интрузивных и осадочных пород
Интрузивные контакты. Контакты интрузивных и осадочных пород Периодическая система химических элементов Д.И. Менделеева
Периодическая система химических элементов Д.И. Менделеева Вывод формул химических веществ
Вывод формул химических веществ ТБ_1 (1)
ТБ_1 (1) Биогеотехнология
Биогеотехнология Ионная химическая связь
Ионная химическая связь Роль нитрадов. Взгляд специалистов
Роль нитрадов. Взгляд специалистов История создания термометра: как придумали первый градусник?
История создания термометра: как придумали первый градусник? Спирты
Спирты Оксиды и гидроксиды
Оксиды и гидроксиды Основные положения теории электролитической диссоциации
Основные положения теории электролитической диссоциации Химические уравнения
Химические уравнения Сфера влияния химии
Сфера влияния химии Методы отбора проб воды. Оформление и подготовка к анализу, протокол исследования воды, определение рН
Методы отбора проб воды. Оформление и подготовка к анализу, протокол исследования воды, определение рН Парафины. Алканы
Парафины. Алканы рН розчину
рН розчину Основы переработки нефти и нефтепродуктов
Основы переработки нефти и нефтепродуктов Метаморфизм
Метаморфизм Нанохімія та основи нанотехнологій
Нанохімія та основи нанотехнологій Составление ионных уравнений
Составление ионных уравнений