- Графы. Теория графов

Содержание
- 2. Графом называется простейшая модель связанной системы, т. е. некоторая выделенная совокупность объектов, между каждой парой элементов
- 3. Теория графов – наука, которая занимается изучением свойств графов и различными способами их математического моделирования (различными
- 4. Один и тот же граф с различным образом помеченными вершинами называется различный представитель графа. Они рассматриваются
- 5. Вершины можно моделировать точками на плоскости. В этом случае связь между любыми двумя вершинами можно моделировать
- 6. Моделируем элементы, составляющую систему, как элементы некоторого множества вершин V, а ненаправленные связи (ребра) между некоторыми
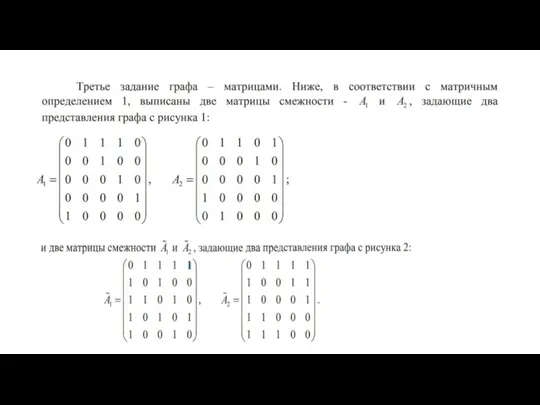
- 7. Матрица смежности графа Любая упорядоченная пара-дуга ( , ) i j v v заданного n-элементного множества
- 9. Графом называется фигура, состоящая из точек, называемых вершинами, и отрезков, соединяющих некоторые из этих вершин. Соединяющие
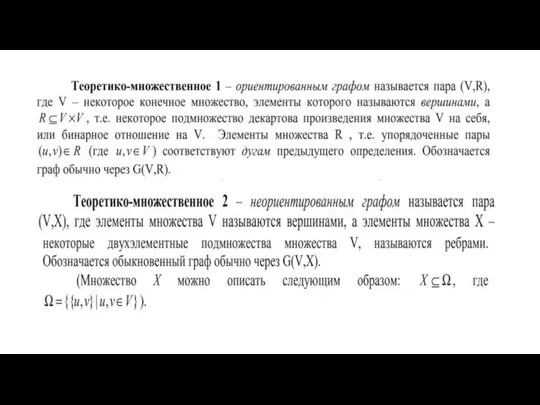
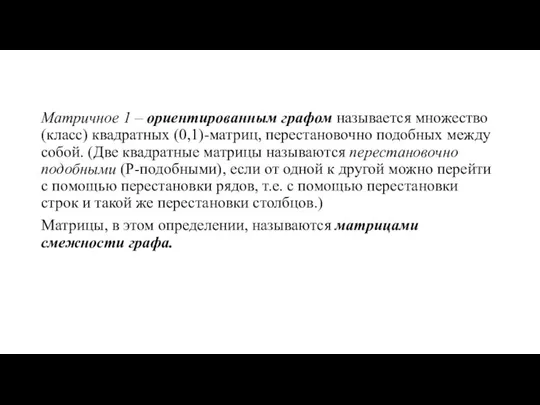
- 11. Матричное 1 – ориентированным графом называется множество (класс) квадратных (0,1)-матриц, перестановочно подобных между собой. (Две квадратные
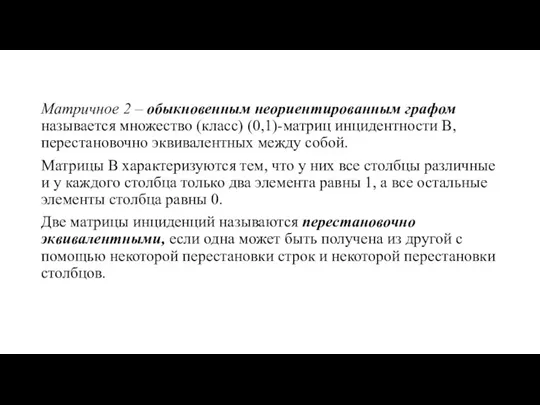
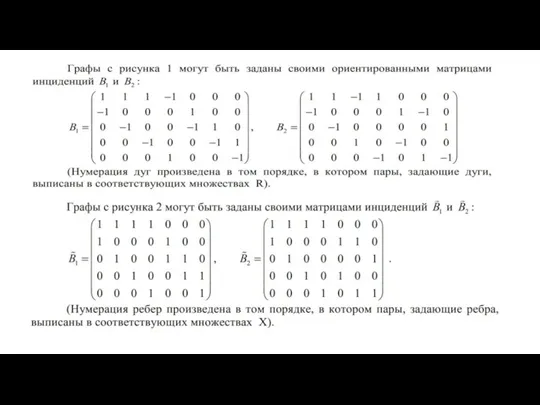
- 12. Матричное 2 – обыкновенным неориентированным графом называется множество (класс) (0,1)-матриц инцидентности B, перестановочно эквивалентных между собой.
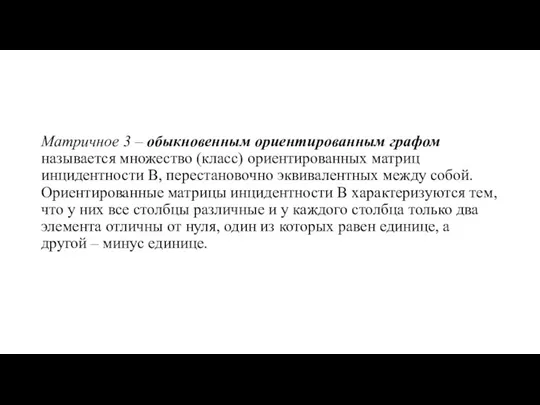
- 13. Матричное 3 – обыкновенным ориентированным графом называется множество (класс) ориентированных матриц инцидентности B, перестановочно эквивалентных между
- 14. Замечание 1. Матричные определения 1, 2 и 3 отличаются от предыдущих тем, что определяют граф как
- 21. Скачать презентацию
Слайд 2Графом называется простейшая модель связанной системы, т. е. некоторая выделенная совокупность объектов,
Графом называется простейшая модель связанной системы, т. е. некоторая выделенная совокупность объектов,
Слайд 3Теория графов – наука, которая занимается изучением свойств графов и различными способами
Теория графов – наука, которая занимается изучением свойств графов и различными способами
Слайд 4Один и тот же граф с различным образом помеченными вершинами называется различный
Один и тот же граф с различным образом помеченными вершинами называется различный
Слайд 5Вершины можно моделировать точками на плоскости. В этом случае связь между любыми
Вершины можно моделировать точками на плоскости. В этом случае связь между любыми
Слайд 6Моделируем элементы, составляющую систему, как элементы некоторого множества вершин V, а ненаправленные
Моделируем элементы, составляющую систему, как элементы некоторого множества вершин V, а ненаправленные
Слайд 7Матрица смежности графа
Любая упорядоченная пара-дуга ( , ) i j v v
Матрица смежности графа
Любая упорядоченная пара-дуга ( , ) i j v v
Слайд 9Графом называется фигура, состоящая из точек, называемых вершинами, и отрезков, соединяющих некоторые
Графом называется фигура, состоящая из точек, называемых вершинами, и отрезков, соединяющих некоторые
Слайд 11Матричное 1 – ориентированным графом называется множество (класс) квадратных (0,1)-матриц, перестановочно подобных
Матричное 1 – ориентированным графом называется множество (класс) квадратных (0,1)-матриц, перестановочно подобных
Слайд 12Матричное 2 – обыкновенным неориентированным графом называется множество (класс) (0,1)-матриц инцидентности B,
Матричное 2 – обыкновенным неориентированным графом называется множество (класс) (0,1)-матриц инцидентности B,
Слайд 13Матричное 3 – обыкновенным ориентированным графом называется множество (класс) ориентированных матриц инцидентности
Матричное 3 – обыкновенным ориентированным графом называется множество (класс) ориентированных матриц инцидентности
Слайд 14Замечание 1. Матричные определения 1, 2 и 3 отличаются от предыдущих тем,
Замечание 1. Матричные определения 1, 2 и 3 отличаются от предыдущих тем,

 Признаки равенства треугольников. Равнобедренный треугольник. Задачи по готовым чертежам
Признаки равенства треугольников. Равнобедренный треугольник. Задачи по готовым чертежам Подготовка к диагностической работе. 5 класс
Подготовка к диагностической работе. 5 класс Элементы теории графов
Элементы теории графов SLUChAJNYE_VELIChINY
SLUChAJNYE_VELIChINY 7fc414894c174883ad06309edf2012ca (1)
7fc414894c174883ad06309edf2012ca (1) Пирамида
Пирамида Своя игра (2)
Своя игра (2) Решение систем логарифмических уравнений (1 курс)
Решение систем логарифмических уравнений (1 курс) Элементы теории графов
Элементы теории графов Прямоугольник. Ромб. Квадрат. Задание из ОГЭ
Прямоугольник. Ромб. Квадрат. Задание из ОГЭ Деление десятичных дробей
Деление десятичных дробей Решение задания 12 ЕГЭ (профиль)
Решение задания 12 ЕГЭ (профиль) Замечательные отрезки многоугольников
Замечательные отрезки многоугольников Л 8 Предел функции
Л 8 Предел функции Сочетания. 9 класс
Сочетания. 9 класс Рекуррентные уравнения
Рекуррентные уравнения Исследовательская работа Загадки треугольника. 9 класс
Исследовательская работа Загадки треугольника. 9 класс Решение неравенств. 8 класс
Решение неравенств. 8 класс Презентация на тему Решаем задачи 1 класс
Презентация на тему Решаем задачи 1 класс  Дробно-рациональные уравнения
Дробно-рациональные уравнения Элементы теории фредгольмовых отображений
Элементы теории фредгольмовых отображений Золотое сечение в архитектуре, скульптуре, живописи
Золотое сечение в архитектуре, скульптуре, живописи Презентация на тему Угол между прямыми
Презентация на тему Угол между прямыми  Векторы. 9 класс
Векторы. 9 класс Цилиндр, конус, шар. Решение задач
Цилиндр, конус, шар. Решение задач Деление на 0,1; 0,01 на 10; 100. Графический диктант
Деление на 0,1; 0,01 на 10; 100. Графический диктант Понятие вектора. Векторы на плоскости
Понятие вектора. Векторы на плоскости Функции и графики
Функции и графики