- Метод составления уравнений неголономной механики в задаче волнового твердотельного гироскопа

Содержание
- 2. Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический формализм, созданный трудами Л.
- 3. Только в 1894 г. в книге «Принципы механики, изложенные в новой связи» (через 106 лет после
- 4. Достаточно полное изложение задач и методов неголономной механики представлено в монографии Ю.И.Неймарка, Н.А.Фуфаева "Динамика неголономных систем"
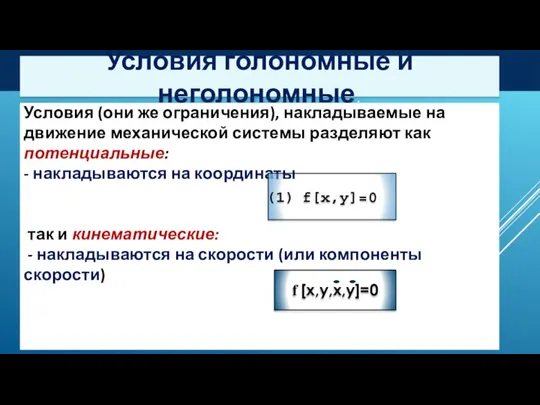
- 5. Условия голономные и неголономные. Условия (они же ограничения), накладываемые на движение механической системы разделяют как потенциальные:
- 6. Условия голономные и неголономные. Задача учета кинематических связей в нелинейном виде не разработана, в линейном виде
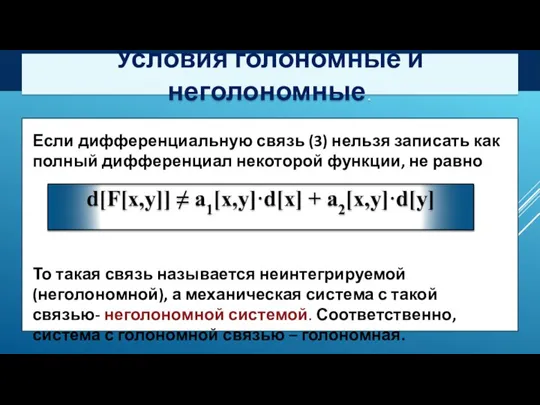
- 7. Условия голономные и неголономные. Если дифференциальную связь (3) нельзя записать как полный дифференциал некоторой функции, не
- 8. Метод составления уравнений динамики механической системы при наложении различных типов условий на переменные. (2) а1 [
- 9. Методы составления уравнений динамики механической системы при наложении различных типов условий на переменные. (2) а1 [
- 10. (2) а1 [ х,у ] х + а2 [х,у ] у =0 Однако, способ уменьшения числа
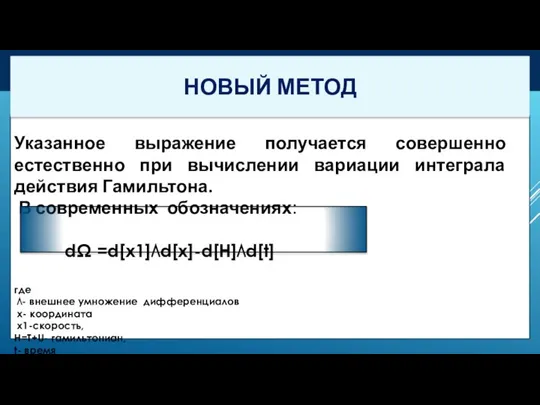
- 11. Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона. В современных обозначениях: dΩ =d[x1]⋀d[x]-d[H]⋀d[t]
- 12. НОВЫЙ МЕТОД Поскольку из этого дифференциального инварианта следует система уравнений движения - любой механической системы, а
- 13. В этом случае использование интегрального инварианта механике по Картану, введение ограничений на переменные механической системы (как
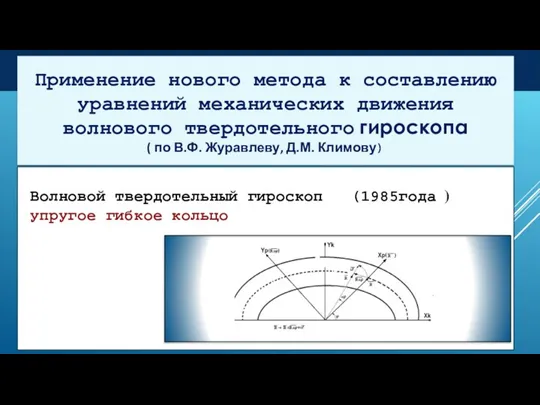
- 14. Применение нового метода к составлению уравнений механических движения волнового твердотельного гироскопа ( по В.Ф. Журавлеву, Д.М.
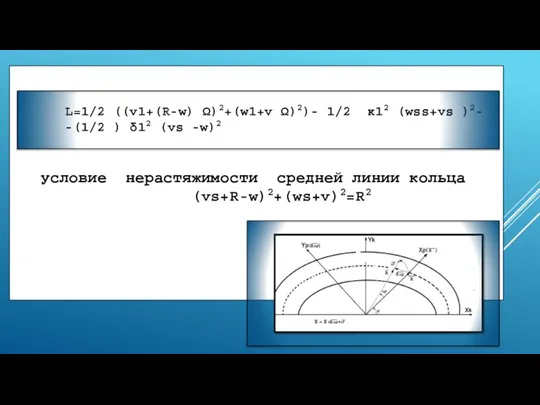
- 15. L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2- -(1/2 ) δ12 (vs -w)2 условие нерастяжимости средней
- 16. применение нового метода дало основные соотношения: d[SID]us= 1/Ω2 (1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2) d[Ω2/2])⋀d[ψ]⋀d[φ]+ +κ12d[r+rss]⋀(d[R Q]-(r+rss) d[φ])⋀d[t]=0
- 17. В рамках приближений введеных авторами книги (применение к полученным уравнениям упрощение v/ -w->0(линеаризация) условия нерастяжимости средней
- 18. Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и в случае когда потенциальной
- 19. Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2) d[Ω2/2]=0 или ((R+r)2+v2) d[Ω2/2]=1/2
- 21. Скачать презентацию
Слайд 2Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Слайд 3Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Слайд 4Достаточно полное изложение задач и методов неголономной механики представлено в монографии Ю.И.Неймарка,
Достаточно полное изложение задач и методов неголономной механики представлено в монографии Ю.И.Неймарка,
Слайд 5Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Слайд 6Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не разработана,
Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не разработана,

Слайд 7Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Слайд 8Метод составления уравнений динамики механической системы при наложении различных типов условий на
Метод составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 9Методы составления уравнений динамики механической системы при наложении различных типов условий на
Методы составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 10(2) а1 [ х,у ] х + а2 [х,у ] у =0
Однако, способ
(2) а1 [ х,у ] х + а2 [х,у ] у =0
Однако, способ
![(2) а1 [ х,у ] х + а2 [х,у ] у =0](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/998506/slide-9.jpg)
Слайд 11
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Слайд 12НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
Слайд 13
В этом случае использование интегрального инварианта механике по Картану, введение ограничений
В этом случае использование интегрального инварианта механике по Картану, введение ограничений
Слайд 14Применение нового метода к составлению уравнений механических движения волнового твердотельного гироскопа
(
Применение нового метода к составлению уравнений механических движения волнового твердотельного гироскопа
(
Слайд 15
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
Слайд 16
применение нового метода дало основные соотношения:
d[SID]us= 1/Ω2 (1/2 d[Ω2 rψ2+Ω2
применение нового метода дало основные соотношения:
d[SID]us= 1/Ω2 (1/2 d[Ω2 rψ2+Ω2
![применение нового метода дало основные соотношения: d[SID]us= 1/Ω2 (1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2) d[Ω2/2])⋀d[ψ]⋀d[φ]+ +κ12d[r+rss]⋀(d[R Q]-(r+rss) d[φ])⋀d[t]=0](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/998506/slide-15.jpg)
Слайд 17
В рамках приближений введеных авторами книги (применение к полученным уравнениям упрощение
В рамках приближений введеных авторами книги (применение к полученным уравнениям упрощение
Слайд 18Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Слайд 19Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
![Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/998506/slide-18.jpg)
 20f
20f Функція реакції
Функція реакції Проценты в нашей жизни. Можно ли обойтись без знаний процентов в повседневной жизни?
Проценты в нашей жизни. Можно ли обойтись без знаний процентов в повседневной жизни? Edukacja matematyczna
Edukacja matematyczna Комплексные числа и действия над ними
Комплексные числа и действия над ними Алгебра логики. Понятие алгебры логики
Алгебра логики. Понятие алгебры логики Устный счёт Прицепи вагоны. 2 класс
Устный счёт Прицепи вагоны. 2 класс Решение задач
Решение задач Презентация на тему Теорема косинусов
Презентация на тему Теорема косинусов  Квадартные уравнения. Основные понятия
Квадартные уравнения. Основные понятия Логарифм и его свойства (1)
Логарифм и его свойства (1) Обыкновенные дифференциальные уравнения. (Лекция 5)
Обыкновенные дифференциальные уравнения. (Лекция 5) Упростите выражение
Упростите выражение Diskretnaya_matematika-2 2
Diskretnaya_matematika-2 2 Решение задач по теме Многогранники
Решение задач по теме Многогранники Математика. Урок 4
Математика. Урок 4 Презентация на тему Приближённые вычисления
Презентация на тему Приближённые вычисления  Решение уравнений
Решение уравнений Шифры и математика
Шифры и математика Задания на логическое мышление
Задания на логическое мышление Комбинаторика. Решение задач
Комбинаторика. Решение задач Действия над комплексными числами
Действия над комплексными числами Презентация на тему Перпендикулярность прямых в пространстве
Презентация на тему Перпендикулярность прямых в пространстве  Современные технологии статистического учета
Современные технологии статистического учета Подобие треугольников. Первый признак подобия
Подобие треугольников. Первый признак подобия Презентация на тему Магия Чисел
Презентация на тему Магия Чисел  Функция
Функция Множитель Произведение
Множитель Произведение