- Симплексный метод планирования. Лекция 6

Содержание
- 2. Метод симплексного планирования позволяет без предварительного изучения влияния факторов найти область оптимума. В этом методе не
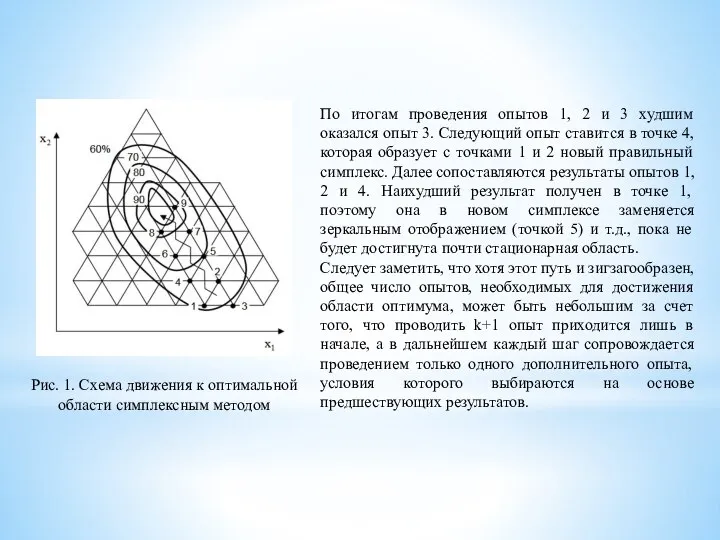
- 3. Рис. 1. Схема движения к оптимальной области симплексным методом По итогам проведения опытов 1, 2 и
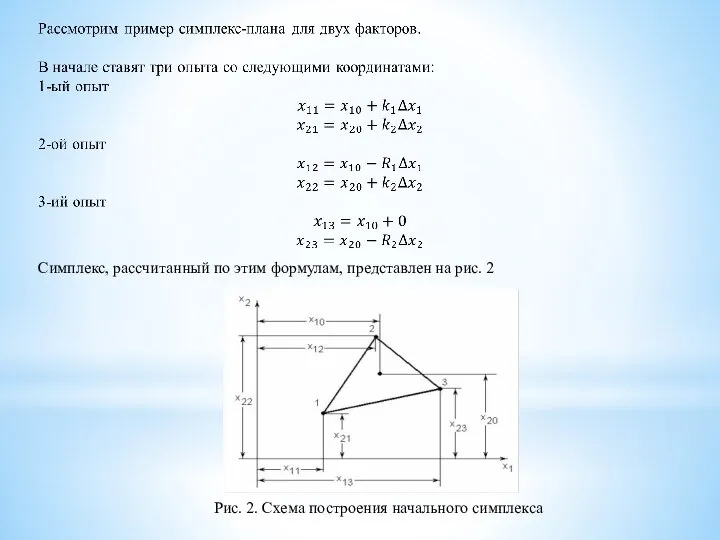
- 5. Симплекс, рассчитанный по этим формулам, представлен на рис. 2 Рис. 2. Схема построения начального симплекса
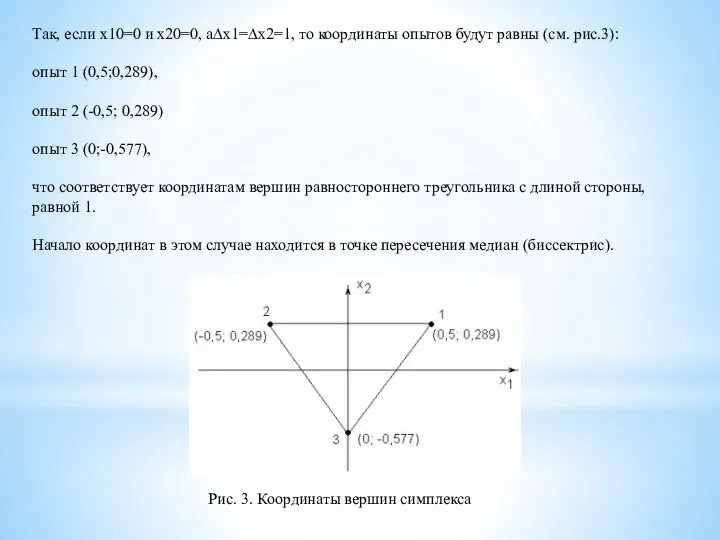
- 6. Так, если x10=0 и x20=0, а∆x1=∆x2=1, то координаты опытов будут равны (см. рис.3): опыт 1 (0,5;0,289),
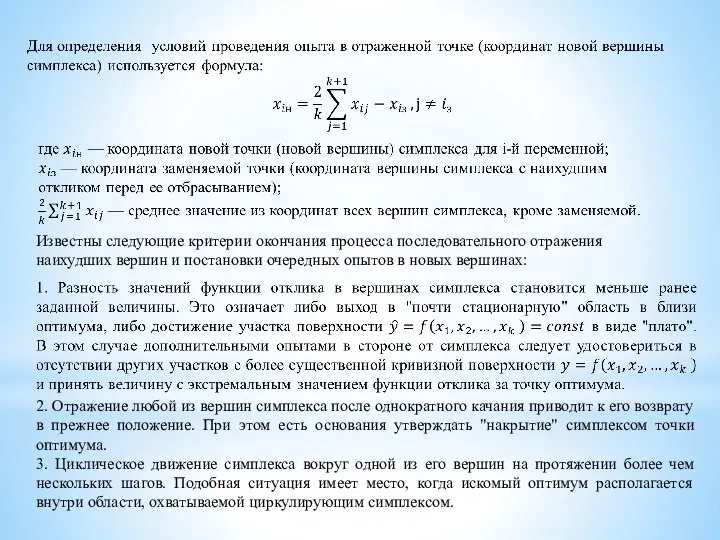
- 7. Известны следующие критерии окончания процесса последовательного отражения наихудших вершин и постановки очередных опытов в новых вершинах:
- 11. Скачать презентацию
Слайд 2Метод симплексного планирования позволяет без предварительного изучения влияния факторов найти область оптимума.
Метод симплексного планирования позволяет без предварительного изучения влияния факторов найти область оптимума.
Слайд 3Рис. 1. Схема движения к оптимальной
области симплексным методом
По итогам проведения опытов
Рис. 1. Схема движения к оптимальной
области симплексным методом
По итогам проведения опытов
Слайд 5
Симплекс, рассчитанный по этим формулам, представлен на рис. 2
Рис. 2. Схема построения
Симплекс, рассчитанный по этим формулам, представлен на рис. 2
Рис. 2. Схема построения
Слайд 6Так, если x10=0 и x20=0, а∆x1=∆x2=1, то координаты опытов будут равны (см.
Так, если x10=0 и x20=0, а∆x1=∆x2=1, то координаты опытов будут равны (см.
Слайд 7
Известны следующие критерии окончания процесса последовательного отражения наихудших вершин и постановки очередных
Известны следующие критерии окончания процесса последовательного отражения наихудших вершин и постановки очередных
 Площадь фигур
Площадь фигур Презентация на тему Комбинаторика
Презентация на тему Комбинаторика  Математика для детей (тест)
Математика для детей (тест) Решение задач по геометрии на параллельность прямых
Решение задач по геометрии на параллельность прямых Осевая симметрия
Осевая симметрия Треугольник. Первый признак равенства треугольников
Треугольник. Первый признак равенства треугольников Случайные события и вероятность
Случайные события и вероятность Рождение числа
Рождение числа Функции. 8 класс
Функции. 8 класс Длина ломанной
Длина ломанной Подготовка к ГИА по математике. Задания 6
Подготовка к ГИА по математике. Задания 6 Цифра и число 9
Цифра и число 9 Простейшие тригонометрические уравнения
Простейшие тригонометрические уравнения Построение таблиц истинности
Построение таблиц истинности Презентация на тему Магия Чисел
Презентация на тему Магия Чисел  Задачи на расстояния в пространстве
Задачи на расстояния в пространстве Книга природы, написанная языком математики
Книга природы, написанная языком математики Уравнение с параметром
Уравнение с параметром Логические операции
Логические операции Презентация на тему Теорема о прямой, перпендикулярной к плоскости
Презентация на тему Теорема о прямой, перпендикулярной к плоскости  Правильные и неправильные дроби. Характеристики миномётов
Правильные и неправильные дроби. Характеристики миномётов Блез Паскаль (1623-1662). Приведение подобных слагаемых
Блез Паскаль (1623-1662). Приведение подобных слагаемых Задания для домашнего обучения
Задания для домашнего обучения Теорема Пифагора
Теорема Пифагора Алгебра логики
Алгебра логики Opredelenny_integral
Opredelenny_integral Обыкновенные и десятичные дроби. Вводное повторение. 7 класс
Обыкновенные и десятичные дроби. Вводное повторение. 7 класс Построение циркулем и линейкой. Примеры задач на построение
Построение циркулем и линейкой. Примеры задач на построение