- Методы составления уравнений неголономной механики в задаче волнового твердотельного гироскопа

Содержание
- 2. Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический формализм, созданный трудами Л.
- 3. Только в 1894 г. в книге «Принципы механики, изложенные в новой связи» (через 106 лет после
- 4. Достаточно полное изложение задач и методов неголономной механики представлено в монографии Ю.И.Неймарка, Н.А.Фуфаева "Динамика неголономных систем"
- 5. Условия голономные и неголономные. Условия (они же ограничения), накладываемые на движение механической системы разделяют как потенциальные:
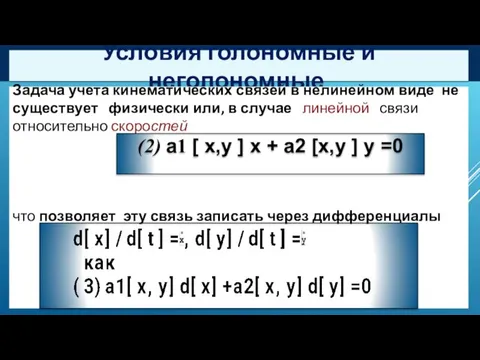
- 6. Условия голономные и неголономные. Задача учета кинематических связей в нелинейном виде не существует физически или, в
- 7. Условия голономные и неголономные. Если дифференциальную связь (3) нельзя записать как полный дифференциал некоторой функции, не
- 8. Условия голономные и неголономные. (2) а1 [ х,у ] х + а2 [х,у ] у =0
- 9. Методы составления уравнений динамики механической системы при наложении различных типов условий на переменные. (2) а1 [
- 10. Методы составления уравнений динамики механической системы при наложении различных типов условий на переменные. (2) а1 [
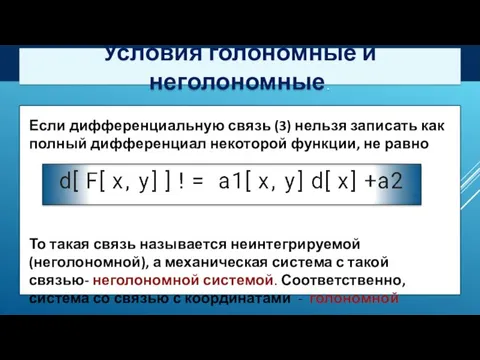
- 11. НОВЫЙ МЕТОД (2) а1 [ х,у ] х + а2 [х,у ] у =0 1) Эквивалентен
- 12. (2) а1 [ х,у ] х + а2 [х,у ] у =0 Однако, способ уменьшения числа
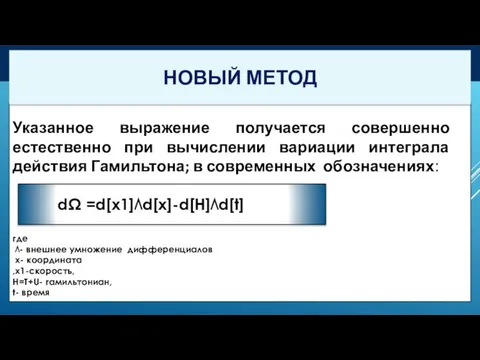
- 13. Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона; в современных обозначениях: dΩ =d[x1]⋀d[x]-d[H]⋀d[t]
- 14. НОВЫЙ МЕТОД Поскольку из этого дифференциального инварианта следует система уравнений движения - любой механической системы, а
- 15. В этом случае использование интегрального инварианта механике по Картану, введение ограничений на переменные механической системы (как
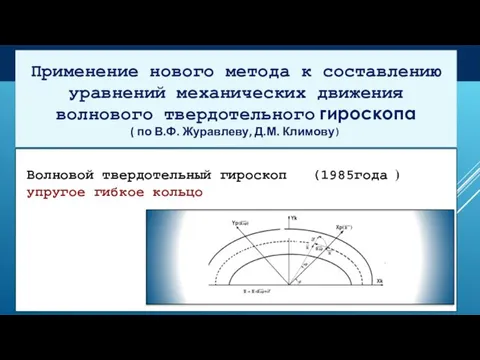
- 16. Применение нового метода к составлению уравнений механических движения волнового твердотельного гироскопа ( по В.Ф. Журавлеву, Д.М.
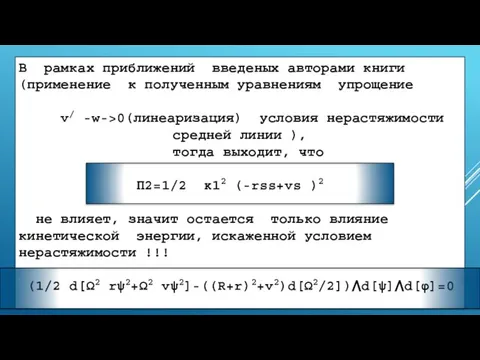
- 17. L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2- -(1/2 ) δ12 (vs -w)2 условие нерастяжимости средней
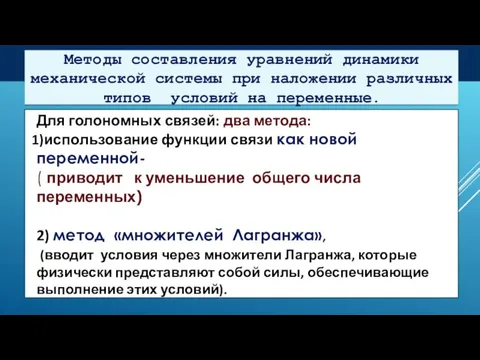
- 18. применение нового метода дало основные соотношения: d°SID°us-1/Ω2 (-(1/2)d[Ω2 rψ2+Ω2 vψ2]+((R+r)2+v2) d[Ω2/2])⋀d[ψ])⋀d[φ] 1/Ω2 (1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2)
- 19. В рамках приближений введеных авторами книги (применение к полученным уравнениям упрощение v/ -w->0(линеаризация) условия нерастяжимости средней
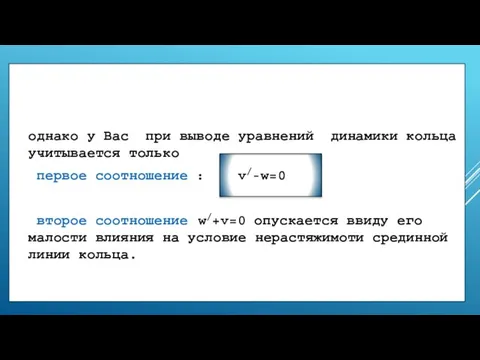
- 20. однако у Вас при выводе уравнений динамики кольца учитывается только первое соотношение : v/-w=0 второе соотношение
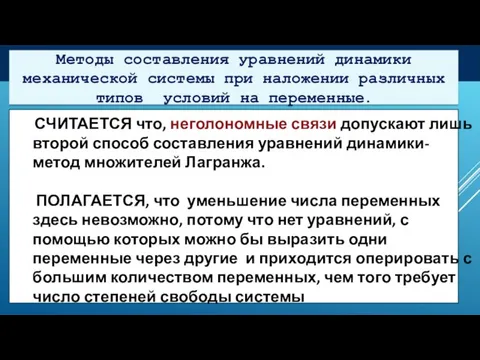
- 21. интересно сравнить с: vs+R-w-> R Cos[Q],-ws-v-> R Sin[Q] получается, что при малом Q,данные соотношения зависят от
- 22. Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и в случае когда потенциальной
- 23. Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2) d[Ω2/2]=0 ((R+r)2+v2) d[Ω2/2]=1/2 d[r12+v12]
- 25. Скачать презентацию
Слайд 2Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Слайд 3Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Слайд 4Достаточно полное изложение задач и методов неголономной механики представлено в монографии Ю.И.Неймарка,
Достаточно полное изложение задач и методов неголономной механики представлено в монографии Ю.И.Неймарка,
Слайд 5Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Слайд 6Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не существует
Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не существует
Слайд 7Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Слайд 8Условия голономные и неголономные.
(2) а1 [ х,у ] х + а2 [х,у ] у
Условия голономные и неголономные.
(2) а1 [ х,у ] х + а2 [х,у ] у
![Условия голономные и неголономные. (2) а1 [ х,у ] х + а2](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/892484/slide-7.jpg)
Слайд 9Методы составления уравнений динамики механической системы при наложении различных типов условий на
Методы составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 10Методы составления уравнений динамики механической системы при наложении различных типов условий на
Методы составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 11НОВЫЙ МЕТОД
(2) а1 [ х,у ] х + а2 [х,у ] у =0
1)
НОВЫЙ МЕТОД
(2) а1 [ х,у ] х + а2 [х,у ] у =0
1)
![НОВЫЙ МЕТОД (2) а1 [ х,у ] х + а2 [х,у ]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/892484/slide-10.jpg)
Слайд 12(2) а1 [ х,у ] х + а2 [х,у ] у =0
Однако, способ
(2) а1 [ х,у ] х + а2 [х,у ] у =0
Однако, способ
![(2) а1 [ х,у ] х + а2 [х,у ] у =0](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/892484/slide-11.jpg)
Слайд 13
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона;
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона;
Слайд 14НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
Слайд 15
В этом случае использование интегрального инварианта механике по Картану, введение ограничений
В этом случае использование интегрального инварианта механике по Картану, введение ограничений
Слайд 16Применение нового метода к составлению уравнений механических движения волнового твердотельного гироскопа
(
Применение нового метода к составлению уравнений механических движения волнового твердотельного гироскопа
(
Слайд 17
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )

Слайд 18
применение нового метода дало основные соотношения:
d°SID°us-1/Ω2 (-(1/2)d[Ω2 rψ2+Ω2 vψ2]+((R+r)2+v2) d[Ω2/2])⋀d[ψ])⋀d[φ]
применение нового метода дало основные соотношения:
d°SID°us-1/Ω2 (-(1/2)d[Ω2 rψ2+Ω2 vψ2]+((R+r)2+v2) d[Ω2/2])⋀d[ψ])⋀d[φ]
![применение нового метода дало основные соотношения: d°SID°us-1/Ω2 (-(1/2)d[Ω2 rψ2+Ω2 vψ2]+((R+r)2+v2) d[Ω2/2])⋀d[ψ])⋀d[φ] 1/Ω2](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/892484/slide-17.jpg)
Слайд 19
В рамках приближений введеных авторами книги (применение к полученным уравнениям упрощение
В рамках приближений введеных авторами книги (применение к полученным уравнениям упрощение
Слайд 20однако у Вас при выводе уравнений динамики кольца учитывается только
первое соотношение
однако у Вас при выводе уравнений динамики кольца учитывается только
первое соотношение
Слайд 21интересно сравнить с:
vs+R-w-> R Cos[Q],-ws-v-> R Sin[Q]
получается, что при малом Q,данные
интересно сравнить с:
vs+R-w-> R Cos[Q],-ws-v-> R Sin[Q]
получается, что при малом Q,данные
![интересно сравнить с: vs+R-w-> R Cos[Q],-ws-v-> R Sin[Q] получается, что при малом](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/892484/slide-20.jpg)
Слайд 22Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Слайд 23Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
![Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/892484/slide-22.jpg)
 Математический калейдоскоп
Математический калейдоскоп Десятичные дроби
Десятичные дроби Алгоритм метода конечных элементов (МКЭ)
Алгоритм метода конечных элементов (МКЭ) Основные задачи и область применения дискретной математики
Основные задачи и область применения дискретной математики Матрицы и определители
Матрицы и определители Теоретический зачет по теме Начальные геометрические сведения
Теоретический зачет по теме Начальные геометрические сведения Оболочки отрицательной Гаусовой кривизны
Оболочки отрицательной Гаусовой кривизны Квадратные уравнения. Урок-путешествие
Квадратные уравнения. Урок-путешествие Предсказание будущего
Предсказание будущего Свойства касательных к окружности. 7 класс
Свойства касательных к окружности. 7 класс Методы решения тригонометрических уравнений
Методы решения тригонометрических уравнений Тригонометрические уравнения. Уравнение cos x=a
Тригонометрические уравнения. Уравнение cos x=a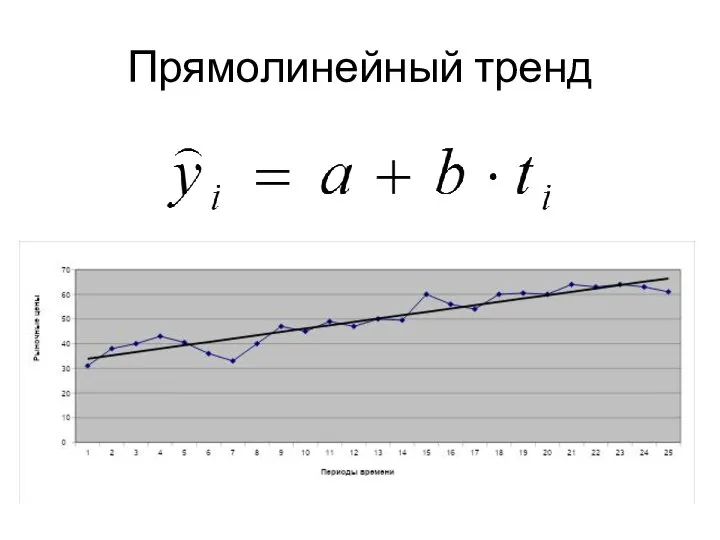 Прямолинейный тренд
Прямолинейный тренд Презентация на тему Действия с целыми числами
Презентация на тему Действия с целыми числами  Презентация на тему Умножение суммы на число
Презентация на тему Умножение суммы на число  Математическая викторина
Математическая викторина Сам за себя. Викторина
Сам за себя. Викторина Аналитические функции и конформные отображения
Аналитические функции и конформные отображения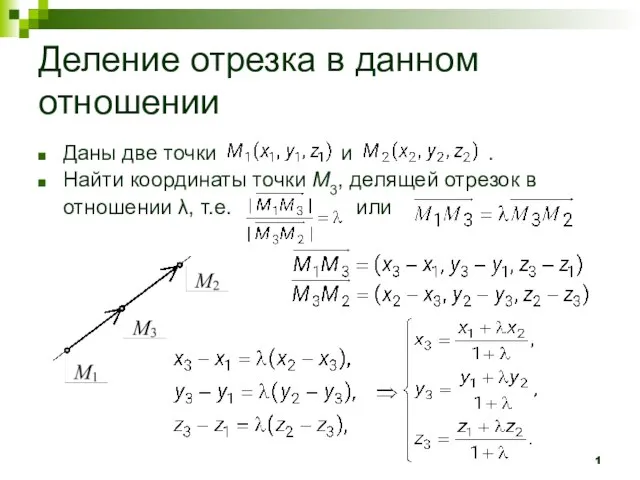 Деление отрезка в данном отношении
Деление отрезка в данном отношении Презентация на тему ПРИМЕНЕНИЕ ТЕСТОВ НА УРОКАХ МАТЕМАТИКИ
Презентация на тему ПРИМЕНЕНИЕ ТЕСТОВ НА УРОКАХ МАТЕМАТИКИ  Связь сложения и умножения
Связь сложения и умножения Учимся складывать столбиком
Учимся складывать столбиком Степень и ее свойства
Степень и ее свойства Треугольники. Задача
Треугольники. Задача Презентация на тему Деление с остатком
Презентация на тему Деление с остатком  Преобразование многочленов с помощью формул сокращённого умножения
Преобразование многочленов с помощью формул сокращённого умножения Логарифмические уравнения. Спецификация ЕГЭ В5. Приемы и методы решения уравнений
Логарифмические уравнения. Спецификация ЕГЭ В5. Приемы и методы решения уравнений Непосредственно-образовательная деятельность по формированию элементарных математических представлений
Непосредственно-образовательная деятельность по формированию элементарных математических представлений