- Математические основы ТАУ (продолжение)

Содержание
- 2. Лекция 6. Математические основы ТАУ (продолжение). План лекции: Дифференциальные уравнения Передаточные функции Временные характеристики Частотные характеристики.
- 3. 1. Дифференциальные уравнения. Существуют следующие формы математического описания динамических свойств линейных звеньев и систем: дифференциальные уравнения
- 4. Математическая связь между выходной и входной величинами и их производными по времени для большинства тепловых объектов
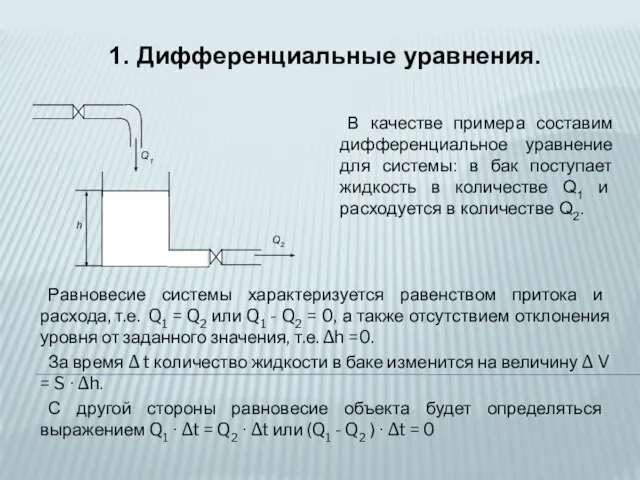
- 5. В качестве примера составим дифференциальное уравнение для системы: в бак поступает жидкость в количестве Q1 и
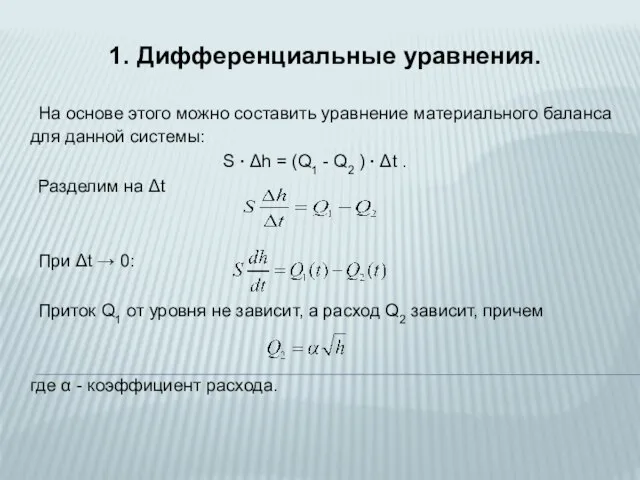
- 6. На основе этого можно составить уравнение материального баланса для данной системы: S ∙ Δh = (Q1
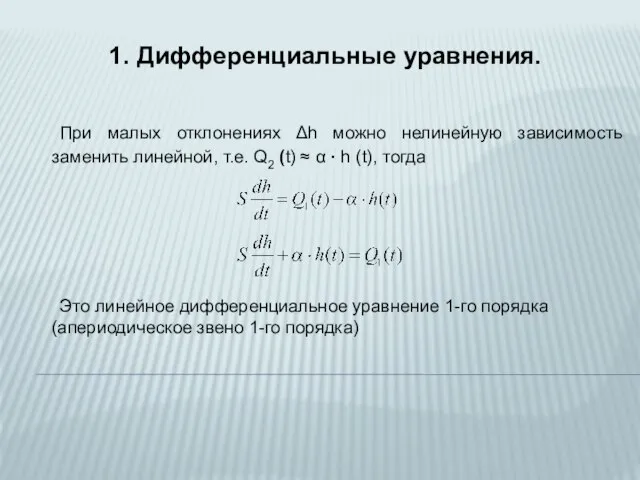
- 7. При малых отклонениях Δh можно нелинейную зависимость заменить линейной, т.е. Q2 (t) ≈ α ∙ h
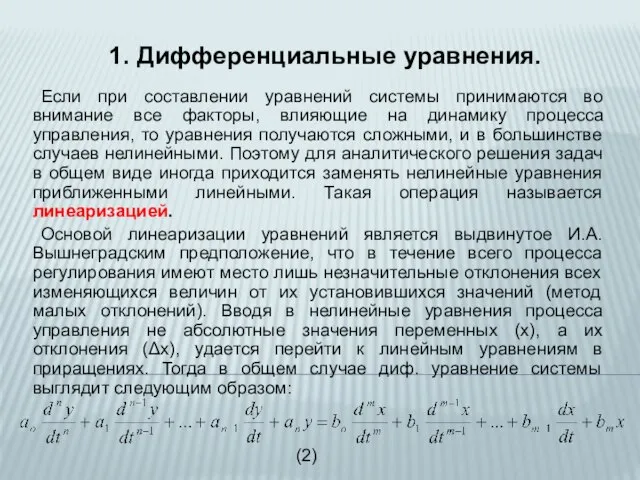
- 8. Если при составлении уравнений системы принимаются во внимание все факторы, влияющие на динамику процесса управления, то
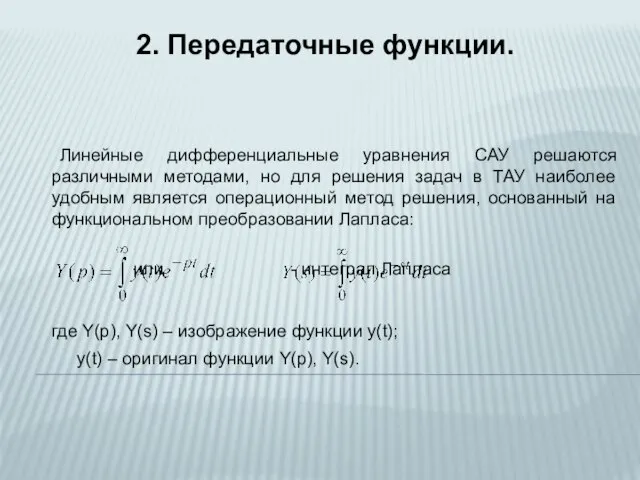
- 9. 2. Передаточные функции. Линейные дифференциальные уравнения САУ решаются различными методами, но для решения задач в ТАУ
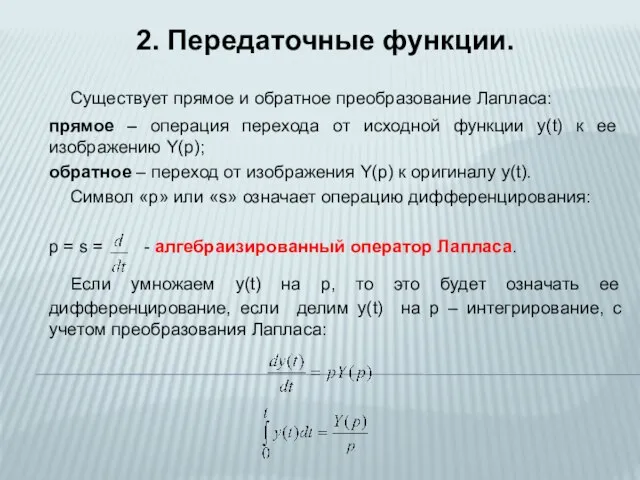
- 10. Существует прямое и обратное преобразование Лапласа: прямое – операция перехода от исходной функции у(t) к ее
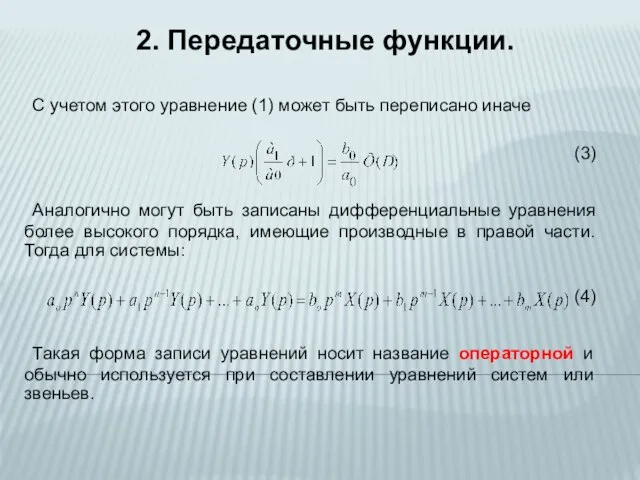
- 11. С учетом этого уравнение (1) может быть переписано иначе (3) Аналогично могут быть записаны дифференциальные уравнения
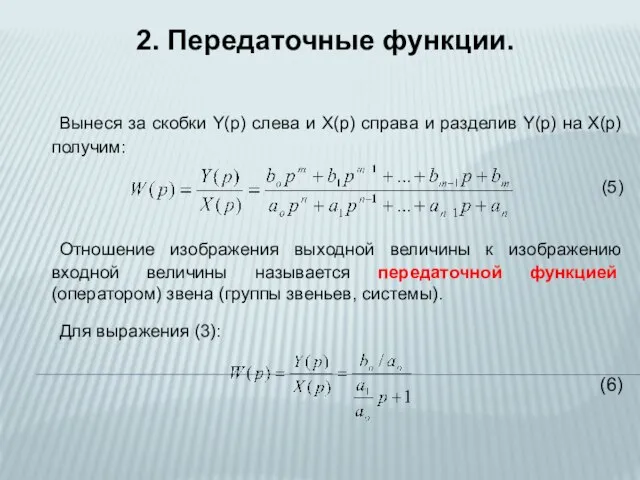
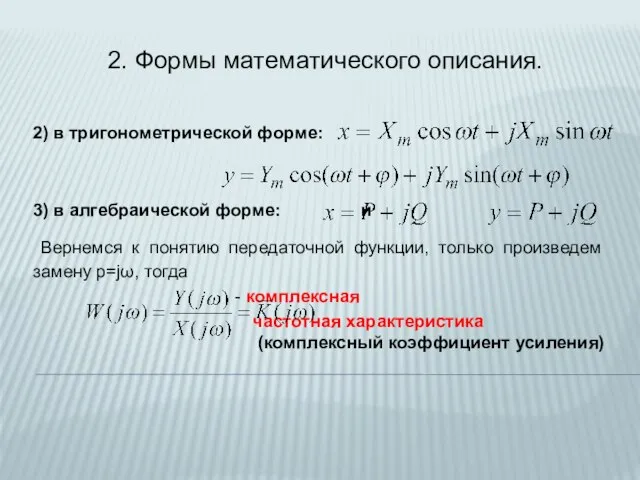
- 12. Вынеся за скобки Y(р) слева и Х(р) справа и разделив Y(р) на Х(р) получим: (5) Отношение
- 13. 3. Временные характеристики. Временной характеристикой называется зависимость изменения выходной величины от входной во времени y(t) =
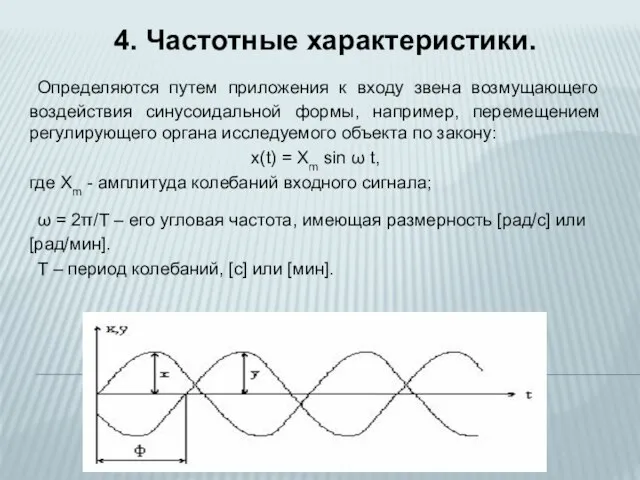
- 14. 4. Частотные характеристики. Определяются путем приложения к входу звена возмущающего воздействия синусоидальной формы, например, перемещением регулирующего
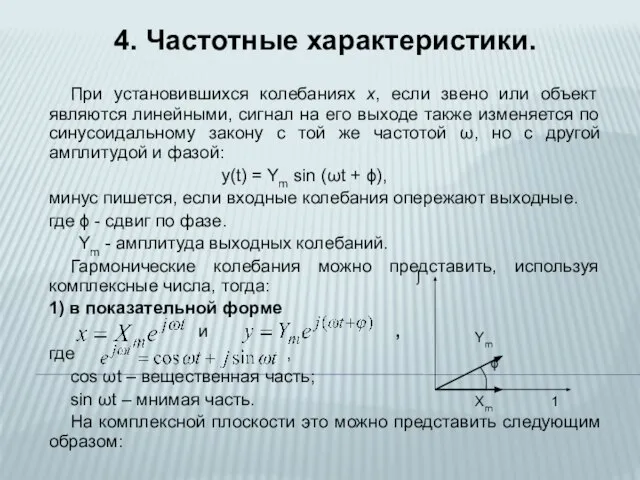
- 15. При установившихся колебаниях x, если звено или объект являются линейными, сигнал на его выходе также изменяется
- 16. 2. Формы математического описания. 2) в тригонометрической форме: 3) в алгебраической форме: и Вернемся к понятию
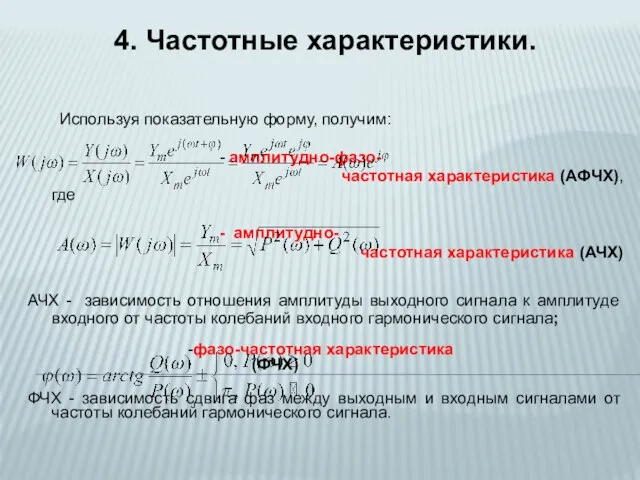
- 17. Используя показательную форму, получим: - амплитудно-фазо- частотная характеристика (АФЧХ), где - амплитудно- частотная характеристика (АЧХ) АЧХ
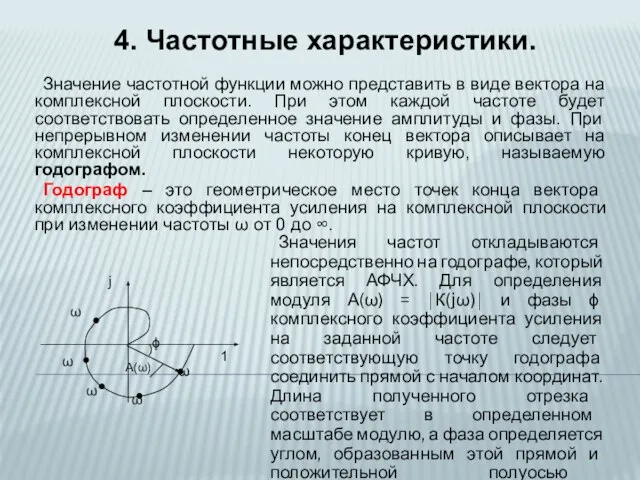
- 18. Значение частотной функции можно представить в виде вектора на комплексной плоскости. При этом каждой частоте будет
- 19. Вопросы для самопроверки: 1) Назовите формы математического описания. 2) Что такое линеаризация? 3) В чем смысл
- 20. Проверим себя ? 1. Операция замены нелинейных уравнений системы приближенными линейными уравнениями называется … А) линеаризацией;
- 22. Скачать презентацию
Слайд 2Лекция 6. Математические основы ТАУ (продолжение).
План лекции:
Дифференциальные уравнения
Передаточные функции
Временные
Лекция 6. Математические основы ТАУ (продолжение).
План лекции:
Дифференциальные уравнения
Передаточные функции
Временные
Слайд 31. Дифференциальные уравнения.
Существуют следующие формы математического описания динамических свойств линейных звеньев
1. Дифференциальные уравнения.
Существуют следующие формы математического описания динамических свойств линейных звеньев
Слайд 4
Математическая связь между выходной и входной величинами и их производными по времени
Математическая связь между выходной и входной величинами и их производными по времени
Слайд 5 В качестве примера составим дифференциальное уравнение для системы: в бак поступает жидкость
В качестве примера составим дифференциальное уравнение для системы: в бак поступает жидкость
Слайд 6 На основе этого можно составить уравнение материального баланса для данной системы:
S ∙
На основе этого можно составить уравнение материального баланса для данной системы:
S ∙
Слайд 7 При малых отклонениях Δh можно нелинейную зависимость заменить линейной, т.е. Q2 (t)
При малых отклонениях Δh можно нелинейную зависимость заменить линейной, т.е. Q2 (t)
Слайд 8 Если при составлении уравнений системы принимаются во внимание все факторы, влияющие на
Если при составлении уравнений системы принимаются во внимание все факторы, влияющие на
Слайд 92. Передаточные функции.
Линейные дифференциальные уравнения САУ решаются различными методами, но для решения
2. Передаточные функции.
Линейные дифференциальные уравнения САУ решаются различными методами, но для решения
Слайд 10 Существует прямое и обратное преобразование Лапласа:
прямое – операция перехода от исходной функции
Существует прямое и обратное преобразование Лапласа:
прямое – операция перехода от исходной функции
Слайд 11 С учетом этого уравнение (1) может быть переписано иначе
(3)
Аналогично могут быть записаны
С учетом этого уравнение (1) может быть переписано иначе
(3)
Аналогично могут быть записаны
Слайд 12 Вынеся за скобки Y(р) слева и Х(р) справа и разделив Y(р) на
Вынеся за скобки Y(р) слева и Х(р) справа и разделив Y(р) на
Слайд 133. Временные характеристики.
Временной характеристикой называется зависимость изменения выходной величины от входной во
3. Временные характеристики.
Временной характеристикой называется зависимость изменения выходной величины от входной во
Слайд 144. Частотные характеристики.
Определяются путем приложения к входу звена возмущающего воздействия синусоидальной формы,
4. Частотные характеристики.
Определяются путем приложения к входу звена возмущающего воздействия синусоидальной формы,
Слайд 15 При установившихся колебаниях x, если звено или объект являются линейными, сигнал на
При установившихся колебаниях x, если звено или объект являются линейными, сигнал на
Слайд 162. Формы математического описания.
2) в тригонометрической форме:
3) в алгебраической форме: и
Вернемся
2. Формы математического описания.
2) в тригонометрической форме:
3) в алгебраической форме: и
Вернемся
Слайд 17 Используя показательную форму, получим:
- амплитудно-фазо-
частотная характеристика (АФЧХ),
где
- амплитудно-
частотная характеристика (АЧХ)
АЧХ
Используя показательную форму, получим:
- амплитудно-фазо-
частотная характеристика (АФЧХ),
где
- амплитудно-
частотная характеристика (АЧХ)
АЧХ
Слайд 18 Значение частотной функции можно представить в виде вектора на комплексной плоскости. При
Значение частотной функции можно представить в виде вектора на комплексной плоскости. При
Слайд 19Вопросы для самопроверки:
1) Назовите формы математического описания.
2) Что такое линеаризация?
3) В
Вопросы для самопроверки:
1) Назовите формы математического описания.
2) Что такое линеаризация?
3) В
Слайд 20Проверим себя ?
1. Операция замены нелинейных уравнений системы приближенными линейными уравнениями называется
Проверим себя ?
1. Операция замены нелинейных уравнений системы приближенными линейными уравнениями называется
 Приёмы устных вычислений вида 470 + 80, 560 - 90
Приёмы устных вычислений вида 470 + 80, 560 - 90 Пирамида и её элементы. Правильная пирамида
Пирамида и её элементы. Правильная пирамида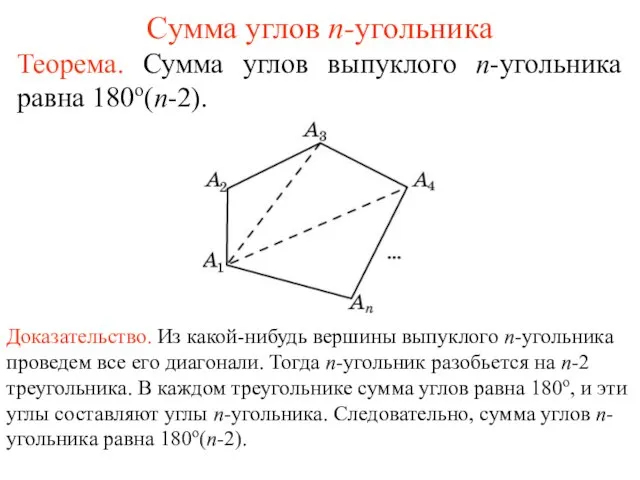 Презентация на тему Сумма углов n-угольника
Презентация на тему Сумма углов n-угольника 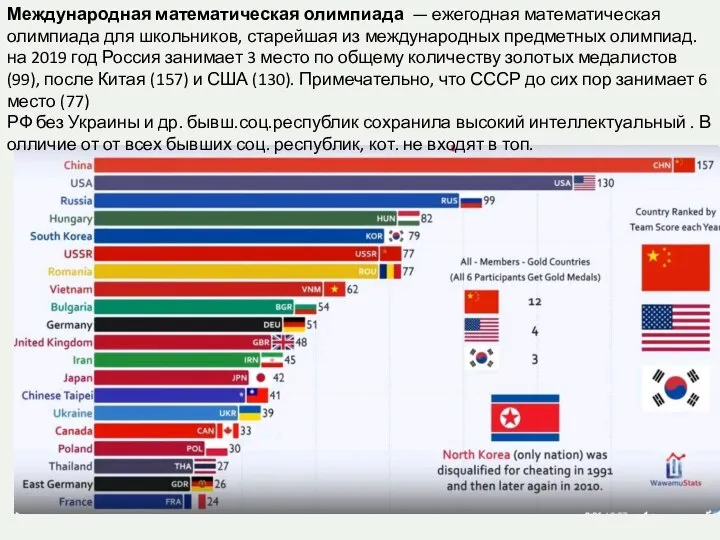 Международная математическая олимпиада
Международная математическая олимпиада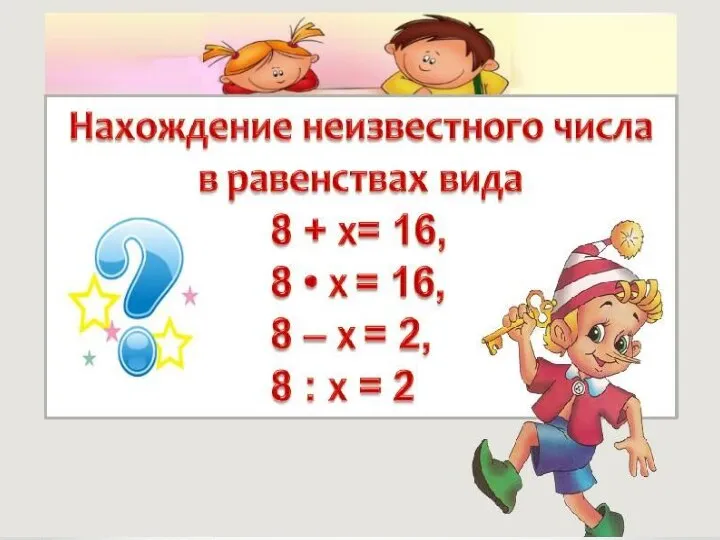 Нахождение неизвестного числа в равенствах вида
Нахождение неизвестного числа в равенствах вида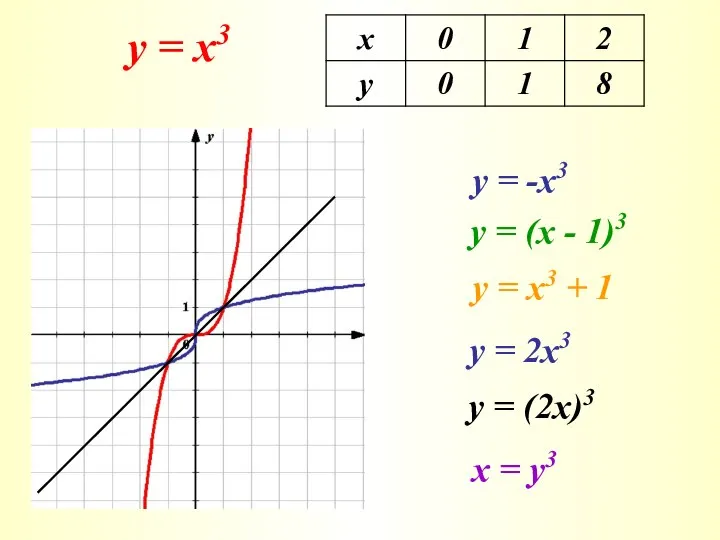 Логарифмические функции
Логарифмические функции Поверхности второго порядка
Поверхности второго порядка Умножение и деление десятичной дроби на единицу с нулями
Умножение и деление десятичной дроби на единицу с нулями Способы решения тригонометрических уравнений
Способы решения тригонометрических уравнений Площади. Теорема Пифагора. Урок - зачёт 8 класс
Площади. Теорема Пифагора. Урок - зачёт 8 класс Векторы. Направление вектора
Векторы. Направление вектора Площадь прямоугольника
Площадь прямоугольника Полное исследование функций и построение их графиков
Полное исследование функций и построение их графиков График линейной функции
График линейной функции Решение тригонометрических уравнений приводимых к алгебраическим
Решение тригонометрических уравнений приводимых к алгебраическим Считаем со Смешариками (1 класс)
Считаем со Смешариками (1 класс) Жили-были числа
Жили-были числа Роль дистанционных конкурсов по математике в гуманитарном развитии обучающихся
Роль дистанционных конкурсов по математике в гуманитарном развитии обучающихся Построение сечений в параллелепипеде
Построение сечений в параллелепипеде Сложение и вычитание. Скобки
Сложение и вычитание. Скобки Множитель Произведение
Множитель Произведение Рене Декарт (1596 -1650)
Рене Декарт (1596 -1650) Нелинейная регрессия
Нелинейная регрессия Презентация на тему Степень с целым показателем
Презентация на тему Степень с целым показателем  Построение сечений
Построение сечений Свойство биссектрисы угла
Свойство биссектрисы угла Работа с векторами
Работа с векторами Деление вида a:а, а:1
Деление вида a:а, а:1