- Векторная алгебра. Расчет модели

Содержание
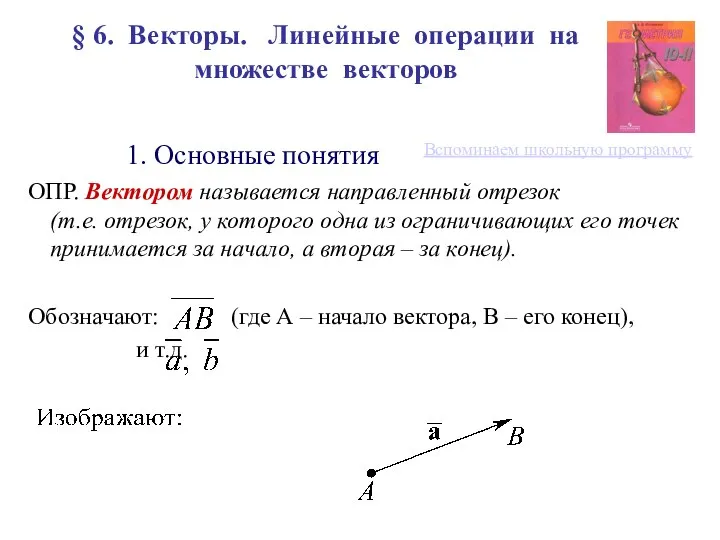
- 2. § 6. Векторы. Линейные операции на множестве векторов 1. Основные понятия ОПР. Вектором называется направленный отрезок
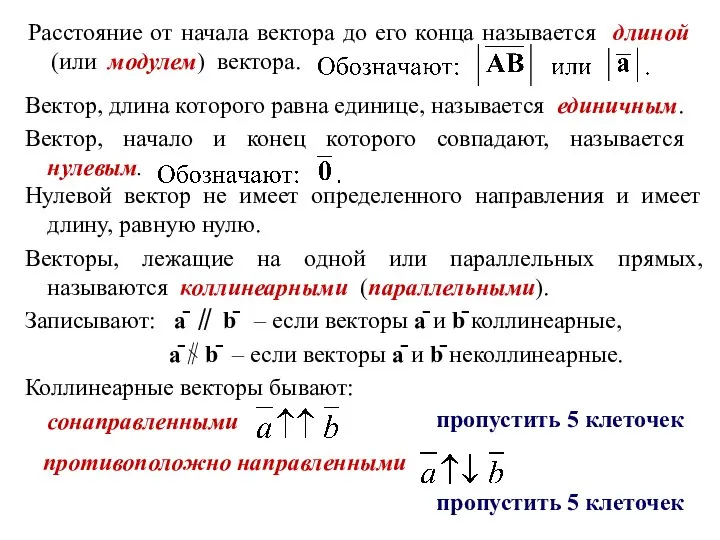
- 3. Расстояние от начала вектора до его конца называется длиной (или модулем) вектора. Вектор, длина которого равна
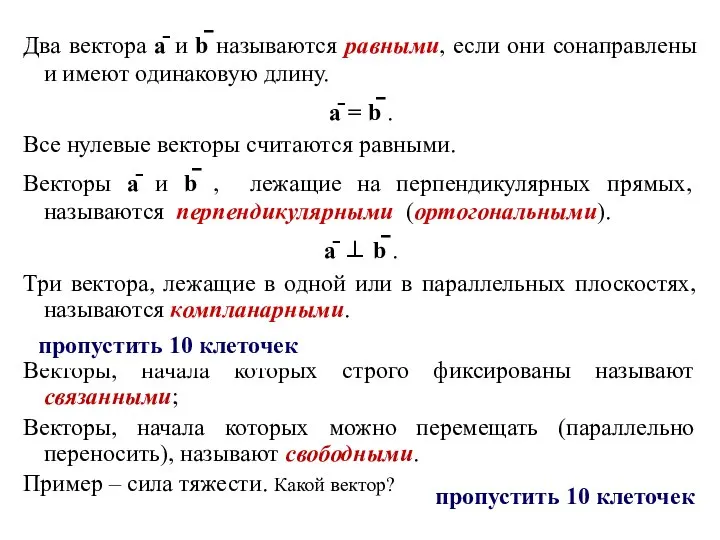
- 4. Два вектора ā и b̄ называются равными, если они сонаправлены и имеют одинаковую длину. ā =
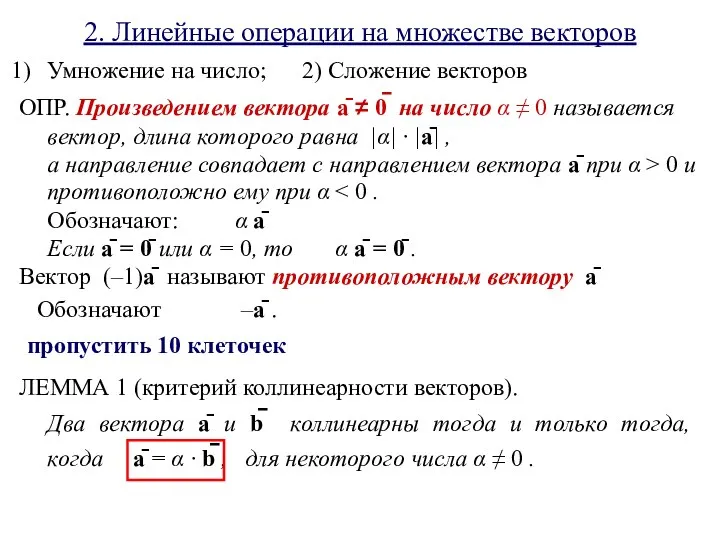
- 5. 2. Линейные операции на множестве векторов Умножение на число; 2) Сложение векторов ОПР. Произведением вектора ā
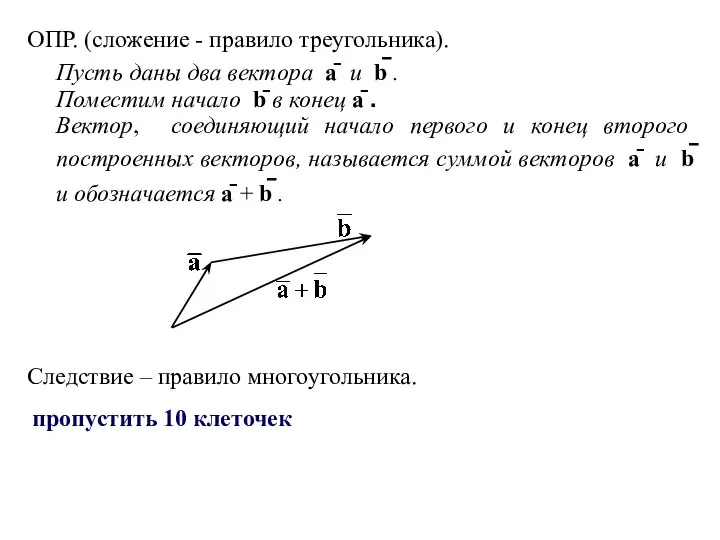
- 6. ОПР. (сложение - правило треугольника). Пусть даны два вектора ā и b̄ . Поместим начало b̄
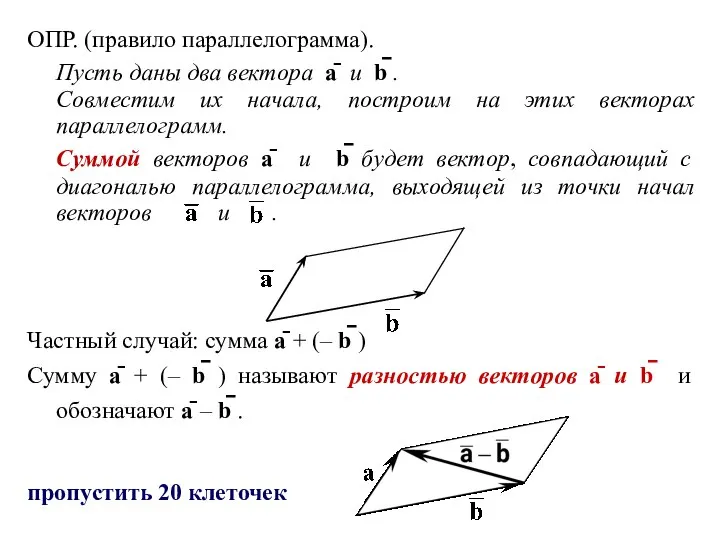
- 7. ОПР. (правило параллелограмма). Пусть даны два вектора ā и b̄ . Совместим их начала, построим на
- 8. СВОЙСТВА ЛИНЕЙНЫХ ОПЕРАЦИЙ НАД ВЕКТОРАМИ 1) ā + b̄ = b̄ + ā (коммутативность сложения векторов);
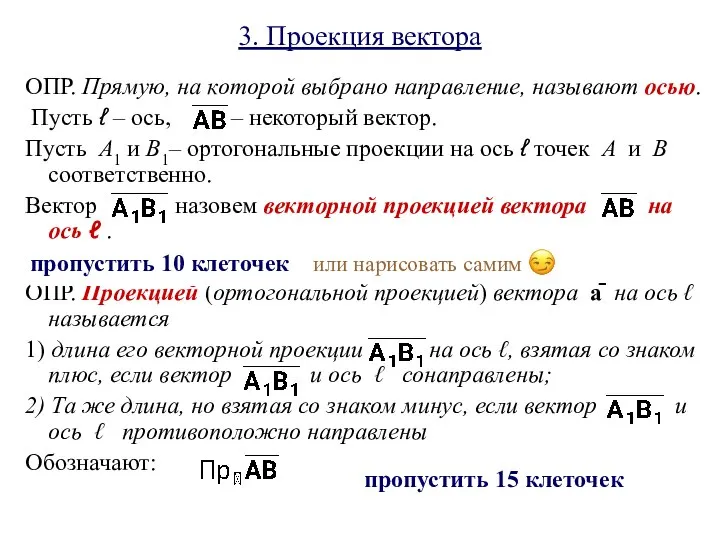
- 9. 3. Проекция вектора ОПР. Прямую, на которой выбрано направление, называют осью. Пусть ℓ – ось, –
- 10. 4. Понятия линейной зависимости и независимости. Базис ОПР. Говорят, что векторы ā1, ā2, …, āk линейно
- 11. Пусть V(3)– множество свободных векторов пространства (V(2) - плоскости). ОПР. Совокупность любых двух линейно независимых векторов,
- 12. Системы координат. ОПР. Осью называется прямая с выбранным на ней направлением. ОПР. Афинной системой координат (косоугольной
- 13. ТЕОРЕМА 4 (о базисе). Каждый вектор множества V(3) (V(2)) линейно выражается через любой его базис ,
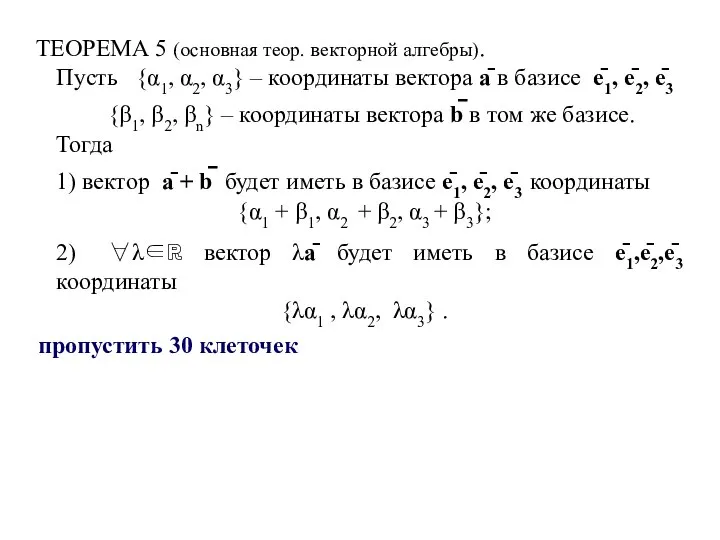
- 14. ТЕОРЕМА 5 (основная теор. векторной алгебры). Пусть {α1, α2, α3} – координаты вектора ā в базисе
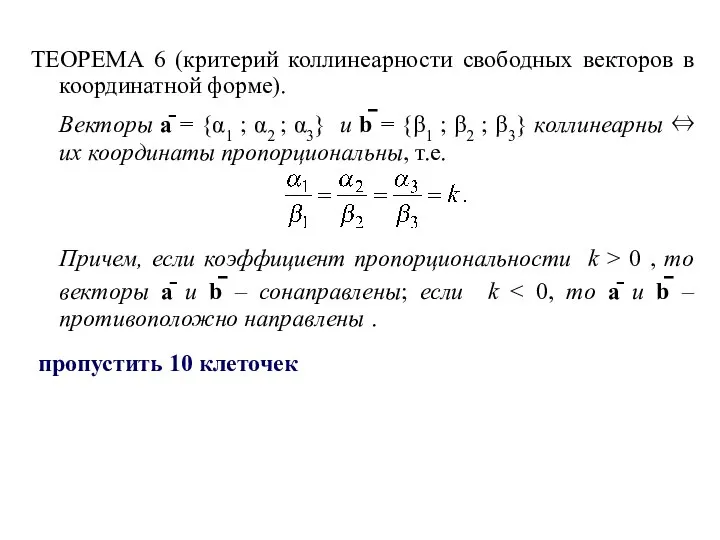
- 15. ТЕОРЕМА 6 (критерий коллинеарности свободных векторов в координатной форме). Векторы ā = {α1 ; α2 ;
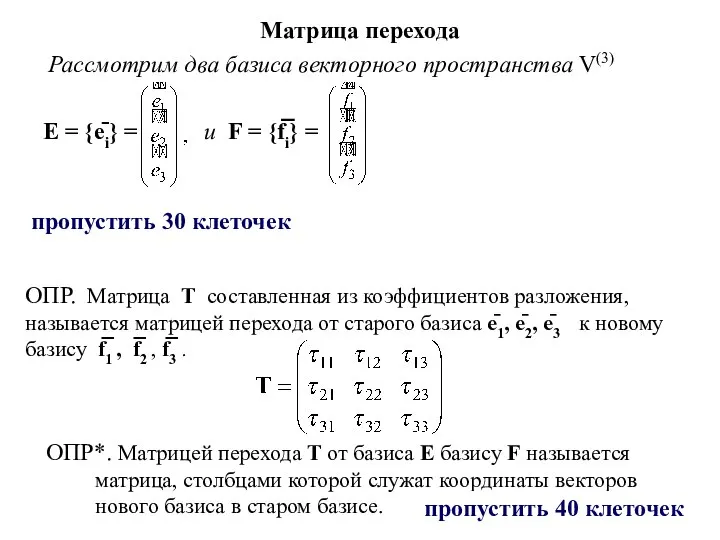
- 16. Матрица перехода Рассмотрим два базиса векторного пространства V(3) Е = {ēi} = и F = {f̅i}
- 18. Скачать презентацию
Слайд 3Расстояние от начала вектора до его конца называется длиной (или модулем) вектора.
Расстояние от начала вектора до его конца называется длиной (или модулем) вектора.
Слайд 4Два вектора ā и b̄ называются равными, если они сонаправлены и имеют
Два вектора ā и b̄ называются равными, если они сонаправлены и имеют
Слайд 52. Линейные операции на множестве векторов
Умножение на число; 2) Сложение векторов
ОПР. Произведением
2. Линейные операции на множестве векторов
Умножение на число; 2) Сложение векторов
ОПР. Произведением
Слайд 6ОПР. (сложение - правило треугольника).
Пусть даны два вектора ā и b̄
ОПР. (сложение - правило треугольника).
Пусть даны два вектора ā и b̄
Слайд 7ОПР. (правило параллелограмма).
Пусть даны два вектора ā и b̄ .
Совместим
ОПР. (правило параллелограмма).
Пусть даны два вектора ā и b̄ .
Совместим
Слайд 8СВОЙСТВА ЛИНЕЙНЫХ ОПЕРАЦИЙ НАД ВЕКТОРАМИ
1) ā + b̄ = b̄ +
СВОЙСТВА ЛИНЕЙНЫХ ОПЕРАЦИЙ НАД ВЕКТОРАМИ
1) ā + b̄ = b̄ +
Слайд 93. Проекция вектора
ОПР. Прямую, на которой выбрано направление, называют осью.
Пусть
3. Проекция вектора
ОПР. Прямую, на которой выбрано направление, называют осью.
Пусть
Слайд 104. Понятия линейной зависимости и независимости. Базис
ОПР. Говорят, что векторы ā1,
4. Понятия линейной зависимости и независимости. Базис
ОПР. Говорят, что векторы ā1,
Слайд 11Пусть V(3)– множество свободных векторов пространства
(V(2) - плоскости).
ОПР. Совокупность любых
Пусть V(3)– множество свободных векторов пространства
(V(2) - плоскости).
ОПР. Совокупность любых
Слайд 12Системы координат.
ОПР. Осью называется прямая с выбранным на ней направлением.
ОПР. Афинной системой
Системы координат.
ОПР. Осью называется прямая с выбранным на ней направлением.
ОПР. Афинной системой
Слайд 13ТЕОРЕМА 4 (о базисе). Каждый вектор множества V(3) (V(2)) линейно выражается через
ТЕОРЕМА 4 (о базисе). Каждый вектор множества V(3) (V(2)) линейно выражается через
Слайд 14ТЕОРЕМА 5 (основная теор. векторной алгебры).
Пусть {α1, α2, α3} – координаты
ТЕОРЕМА 5 (основная теор. векторной алгебры).
Пусть {α1, α2, α3} – координаты
Слайд 15ТЕОРЕМА 6 (критерий коллинеарности свободных векторов в координатной форме).
Векторы ā =
ТЕОРЕМА 6 (критерий коллинеарности свободных векторов в координатной форме).
Векторы ā =
Слайд 16Матрица перехода
Рассмотрим два базиса векторного пространства V(3)
Е = {ēi} = и
Матрица перехода
Рассмотрим два базиса векторного пространства V(3)
Е = {ēi} = и
 Решение задач. Повтори изученное
Решение задач. Повтори изученное Презентация на тему Метр (2 класс)
Презентация на тему Метр (2 класс)  Презентация на тему Комбинаторные задачи: размещения
Презентация на тему Комбинаторные задачи: размещения  Линейное программирование
Линейное программирование Неопределенный интеграл
Неопределенный интеграл Правильные многогранники вокруг нас
Правильные многогранники вокруг нас Решение уравнений. Математика. 6 класс
Решение уравнений. Математика. 6 класс Предел числовой последовательности
Предел числовой последовательности Преобразование тригонометрического выражения
Преобразование тригонометрического выражения Математическое моделирование. Основные положения
Математическое моделирование. Основные положения Перпендикулярности прямой и плоскости
Перпендикулярности прямой и плоскости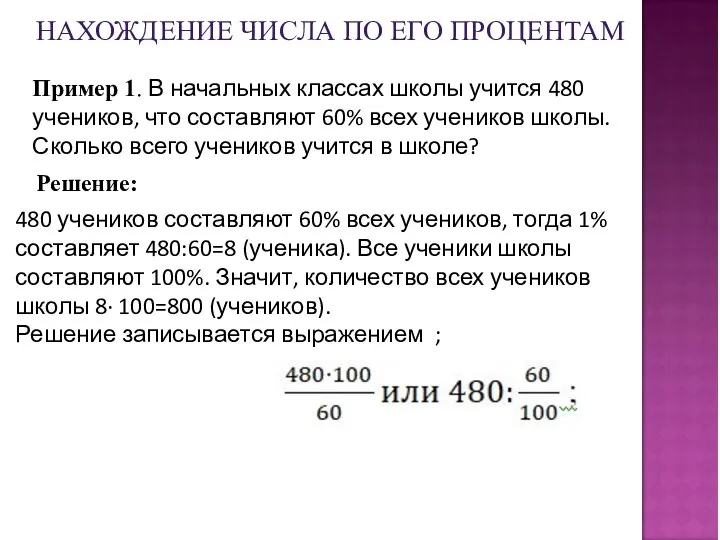 Нахождение числа по его процентам
Нахождение числа по его процентам Изучаем цифры и знаки вместе со Смешариками
Изучаем цифры и знаки вместе со Смешариками Математическая модель круга общения человека в течение жизни
Математическая модель круга общения человека в течение жизни Конус
Конус Реши примеры устно. 2 класс
Реши примеры устно. 2 класс Контрольная по математике. 2 класс
Контрольная по математике. 2 класс Методология и методы в статистике
Методология и методы в статистике Сумма углов в треугольнике
Сумма углов в треугольнике Соотношения между сторонами и углами треугольника. 7 класс
Соотношения между сторонами и углами треугольника. 7 класс Понятие вектора. Равенство векторов
Понятие вектора. Равенство векторов Дроби
Дроби Какая бывает фигура?
Какая бывает фигура? Презентация на тему ЗАДАЧИ, ПРИВОДЯЩИЕ К ПОНЯТИЮ ПРОИЗВОДНОЙ
Презентация на тему ЗАДАЧИ, ПРИВОДЯЩИЕ К ПОНЯТИЮ ПРОИЗВОДНОЙ  Преобразование рациональных выражений
Преобразование рациональных выражений Сайы. Умумий малюмат
Сайы. Умумий малюмат Теорія ймовірностей, ймовірнісні процеси і математична статистика
Теорія ймовірностей, ймовірнісні процеси і математична статистика Центральные углы и углы, вписанные в окружность
Центральные углы и углы, вписанные в окружность