- Інвалідна коляска

Содержание
- 2. Мета: Спираючись на обрану технічну систему вивчити об’єктивні закономірності розвитку і функціонування технічних систем. Завдання: Вибрати
- 3. Визначення Инвалідне крісло-коляска — технічний пересувний прилад для людей, що тимчасово не мають можливості рухатися (із-за
- 4. Функції системи Достатньо швидке пересування людини, з порушенням роботи опорно-рухового апарату. Забезпечення плавного руху а також
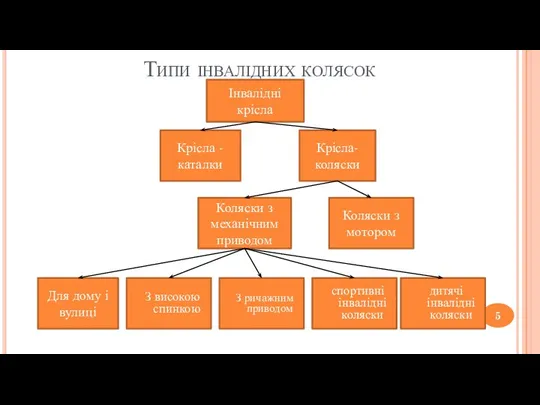
- 5. Типи інвалідних колясок Крісла -каталки Крісла-коляски Коляски з механічним приводом Коляски з мотором Інвалідні крісла Для
- 6. Принцип дії системи Передача прикладеної сили або електронного сигналу до відповідного елементу системи з метою переміщення
- 7. Основні частини розглянутої системи: Система живлення-жива сила, тобто використання фізичної енергії для пересування або перевізний акумулятор(для
- 8. Закон повноти частин системи
- 9. Узгодження роботи частин системи.
- 10. Закони кінематики Закон збільшення ідеальності системи: - Функцію переміщення інваліда можуть виконувати технологічно-розвинені протези. Використання нанороботів
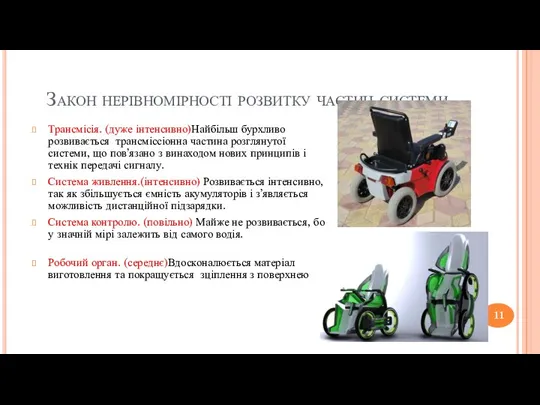
- 11. Закон нерівномірності розвитку частин системи Трансмісія. (дуже інтенсивно)Найбільш бурхливо розвивається трансміссіонна частина розглянутої системи, що пов’язано
- 12. Вимоги к сучасним інвалідним коляскам тип приводу повинен відповідати в першу чергу фізичним можливостям і потребам
- 13. Шляхи удосконалення інвалідних Колясок
- 14. Закон переходу с макро- на мікро і нано рівень Як ідея-підключення електронних чипів до кори головного
- 15. Закон збільшення степені вепольності Підзарядка акумулятора за допомогою електромагнітного поля. Керування коляскою, при віддалені пацієнта від
- 17. Скачать презентацию
Слайд 2Мета: Спираючись на обрану технічну систему вивчити об’єктивні закономірності розвитку і функціонування
Мета: Спираючись на обрану технічну систему вивчити об’єктивні закономірності розвитку і функціонування
Слайд 3Визначення
Инвалідне крісло-коляска — технічний пересувний прилад для людей, що тимчасово не мають можливості
Визначення
Инвалідне крісло-коляска — технічний пересувний прилад для людей, що тимчасово не мають можливості

Слайд 4Функції системи
Достатньо швидке пересування людини, з порушенням роботи опорно-рухового апарату.
Забезпечення плавного руху
Функції системи
Достатньо швидке пересування людини, з порушенням роботи опорно-рухового апарату.
Забезпечення плавного руху
Слайд 5Типи інвалідних колясок
Крісла -каталки
Крісла-коляски
Коляски з механічним приводом
Коляски з мотором
Інвалідні крісла
Для дому
Типи інвалідних колясок
Крісла -каталки
Крісла-коляски
Коляски з механічним приводом
Коляски з мотором
Інвалідні крісла
Для дому
Слайд 6Принцип дії системи
Передача прикладеної сили або електронного сигналу до відповідного елементу системи
Принцип дії системи
Передача прикладеної сили або електронного сигналу до відповідного елементу системи

Слайд 7
Основні частини розглянутої системи:
Система живлення-жива сила, тобто використання фізичної енергії для пересування
Основні частини розглянутої системи:
Система живлення-жива сила, тобто використання фізичної енергії для пересування
Слайд 8Закон повноти частин системи
Закон повноти частин системи

Слайд 9Узгодження роботи частин системи.
Узгодження роботи частин системи.
Слайд 10Закони кінематики
Закон збільшення ідеальності системи:
- Функцію переміщення інваліда можуть виконувати технологічно-розвинені
Закони кінематики
Закон збільшення ідеальності системи:
- Функцію переміщення інваліда можуть виконувати технологічно-розвинені

Слайд 11Закон нерівномірності розвитку частин системи
Трансмісія. (дуже інтенсивно)Найбільш бурхливо розвивається трансміссіонна частина розглянутої
Закон нерівномірності розвитку частин системи
Трансмісія. (дуже інтенсивно)Найбільш бурхливо розвивається трансміссіонна частина розглянутої
Слайд 12 Вимоги к сучасним інвалідним коляскам
тип приводу повинен відповідати в першу чергу
Вимоги к сучасним інвалідним коляскам
тип приводу повинен відповідати в першу чергу
Слайд 13Шляхи удосконалення інвалідних Колясок
Шляхи удосконалення інвалідних Колясок
Слайд 14Закон переходу с макро- на мікро і нано рівень
Як ідея-підключення електронних чипів
Закон переходу с макро- на мікро і нано рівень
Як ідея-підключення електронних чипів
Слайд 15Закон збільшення степені вепольності
Підзарядка акумулятора за допомогою електромагнітного поля.
Керування коляскою, при віддалені
Закон збільшення степені вепольності
Підзарядка акумулятора за допомогою електромагнітного поля.
Керування коляскою, при віддалені
 Закаливание организма. Гигиена одежды. 8 класс
Закаливание организма. Гигиена одежды. 8 класс Моющее средство. Детергент
Моющее средство. Детергент Новоутворення яєчників після гістеректомії: діагностика і тактика оперативного лікування
Новоутворення яєчників після гістеректомії: діагностика і тактика оперативного лікування Василевич Ксении гр.302
Василевич Ксении гр.302 Гигиена опорно-двигательной системы
Гигиена опорно-двигательной системы Выделение. Строение и функция почек
Выделение. Строение и функция почек Прогностическая значимость маркера TMPRSS2-ERG для диагностики рака предстательной железы
Прогностическая значимость маркера TMPRSS2-ERG для диагностики рака предстательной железы Открытое овальное окно и ишемический инсульт
Открытое овальное окно и ишемический инсульт Особенности сестринского ухода за инфекционными больными. Сестринский процесс. Сестринский диагноз
Особенности сестринского ухода за инфекционными больными. Сестринский процесс. Сестринский диагноз Ингибиторы фибринолиза. Тема 31
Ингибиторы фибринолиза. Тема 31 Группы крови
Группы крови Новообразования
Новообразования Бактериофаги
Бактериофаги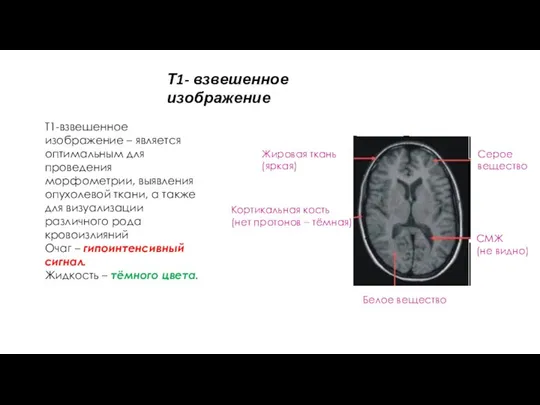 Режимы МРТ
Режимы МРТ Влияние татуировок и пирсинга на физическое и психическое состояние студента
Влияние татуировок и пирсинга на физическое и психическое состояние студента Кожные болезни. Раздел 2. Заболевания желез
Кожные болезни. Раздел 2. Заболевания желез Костная ткань
Костная ткань Врожденные пороки сердца у детей
Врожденные пороки сердца у детей Hepatitis
Hepatitis Эссенциальный тремор
Эссенциальный тремор Дисфункциональные расстройства биоиарного тракта
Дисфункциональные расстройства биоиарного тракта Трудность оперативного вмешательства на внутреннем и среднем ухе
Трудность оперативного вмешательства на внутреннем и среднем ухе УЗИ предстательной железы
УЗИ предстательной железы Курс Психиатрия. Введение
Курс Психиатрия. Введение Пищевые микробные отравления
Пищевые микробные отравления Асептика и антисептика
Асептика и антисептика Тип фигуры
Тип фигуры Заболевания органов дыхания
Заболевания органов дыхания