- Графовые модели. Основные понятия. Принцип планирования многошаговых процессов

Содержание
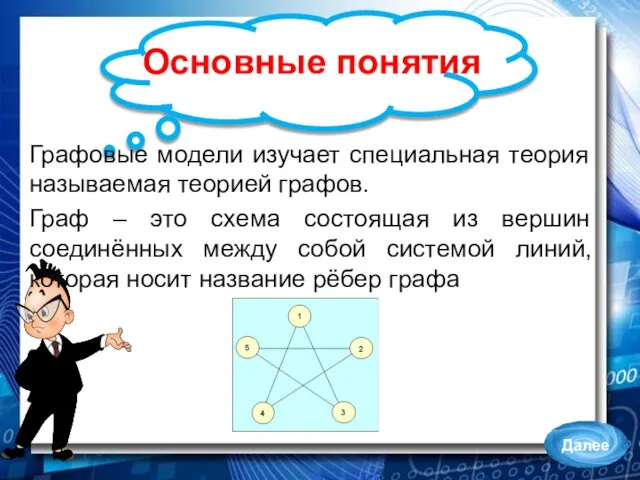
- 2. Основные понятия Графовые модели изучает специальная теория называемая теорией графов. Граф – это схема состоящая из
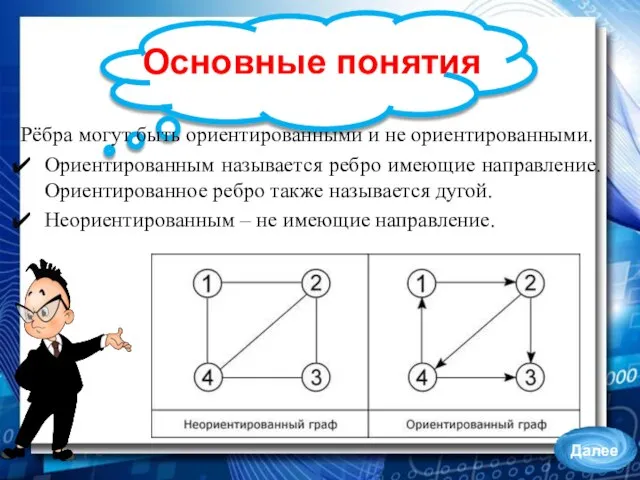
- 3. Основные понятия Рёбра могут быть ориентированными и не ориентированными. Ориентированным называется ребро имеющие направление. Ориентированное ребро
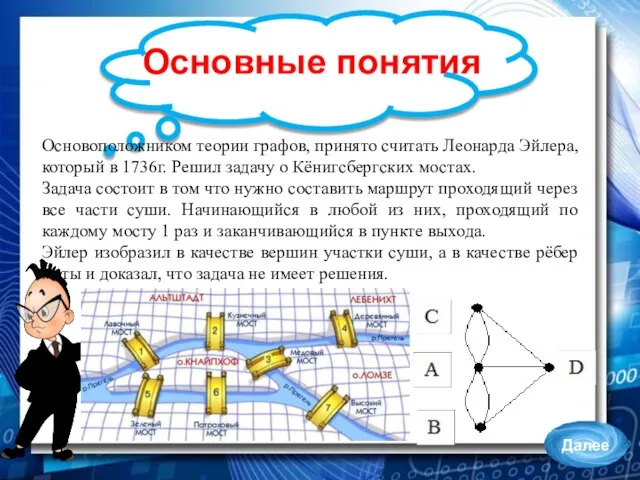
- 4. Основные понятия Основоположником теории графов, принято считать Леонарда Эйлера, который в 1736г. Решил задачу о Кёнигсбергских
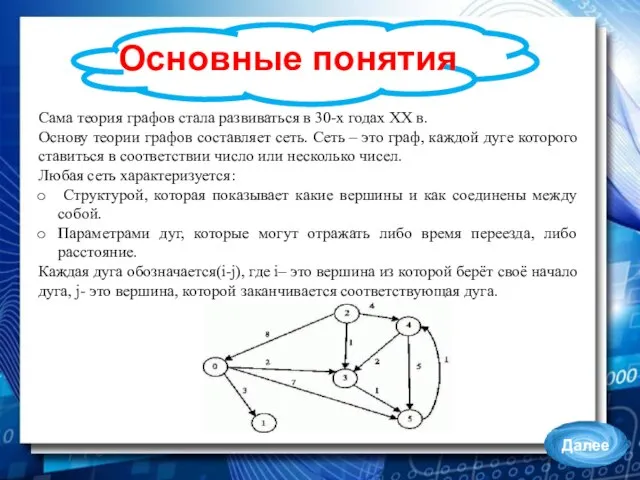
- 5. Основные понятия Сама теория графов стала развиваться в 30-х годах XX в. Основу теории графов составляет
- 6. Принцип планирования многошаговых процессов Данный принцип (метод) был изобретен в 1947 году американским ученым Беллманом. Он
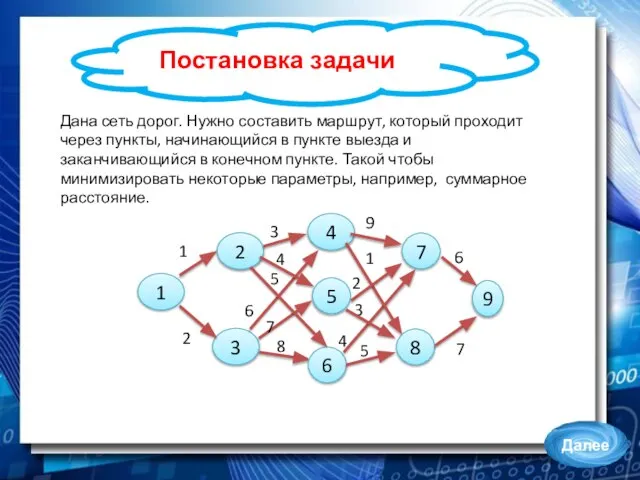
- 7. Постановка задачи Дана сеть дорог. Нужно составить маршрут, который проходит через пункты, начинающийся в пункте выезда
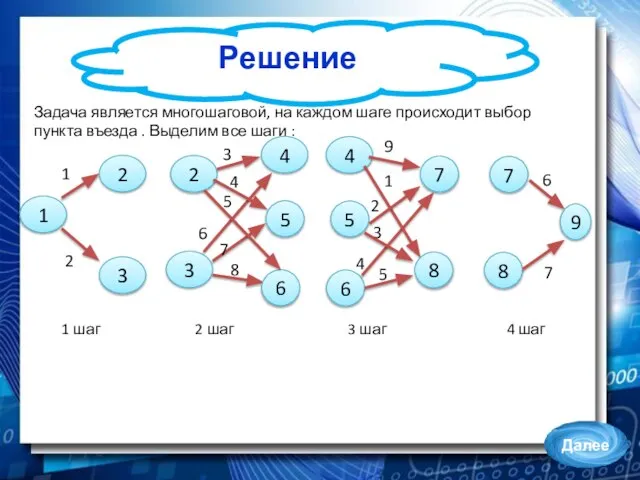
- 8. Решение Задача является многошаговой, на каждом шаге происходит выбор пункта въезда . Выделим все шаги :
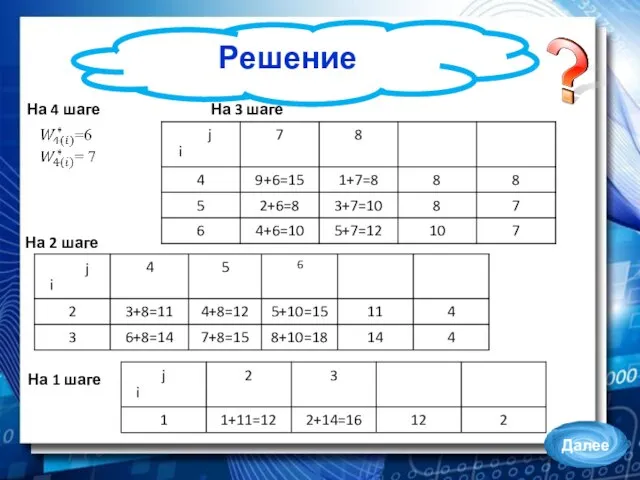
- 9. Решение На 4 шаге На 3 шаге j На 2 шаге На 1 шаге i i
- 11. Скачать презентацию
Слайд 2Основные понятия
Графовые модели изучает специальная теория называемая теорией графов.
Граф – это схема
Основные понятия
Графовые модели изучает специальная теория называемая теорией графов.
Граф – это схема
Слайд 3Основные понятия
Рёбра могут быть ориентированными и не ориентированными.
Ориентированным называется ребро имеющие
Основные понятия
Рёбра могут быть ориентированными и не ориентированными.
Ориентированным называется ребро имеющие
Слайд 4Основные понятия
Основоположником теории графов, принято считать Леонарда Эйлера, который в 1736г. Решил
Основные понятия
Основоположником теории графов, принято считать Леонарда Эйлера, который в 1736г. Решил
Слайд 5Основные понятия
Сама теория графов стала развиваться в 30-х годах XX в.
Основу теории
Основные понятия
Сама теория графов стала развиваться в 30-х годах XX в.
Основу теории
Слайд 6Принцип планирования многошаговых процессов
Данный принцип (метод) был изобретен в 1947 году американским
Принцип планирования многошаговых процессов
Данный принцип (метод) был изобретен в 1947 году американским
Слайд 7Постановка задачи
Дана сеть дорог. Нужно составить маршрут, который проходит через пункты, начинающийся
Постановка задачи
Дана сеть дорог. Нужно составить маршрут, который проходит через пункты, начинающийся
Слайд 8Решение
Задача является многошаговой, на каждом шаге происходит выбор пункта въезда .
Решение
Задача является многошаговой, на каждом шаге происходит выбор пункта въезда .
Слайд 9Решение
На 4 шаге
На 3 шаге
j
На 2 шаге
На 1 шаге
i
i
i
Решение
На 4 шаге
На 3 шаге
j
На 2 шаге
На 1 шаге
i
i
i
 Многогранники, 10 класс
Многогранники, 10 класс Длина окружности. Площадь круга
Длина окружности. Площадь круга Умножение десятичных дробей
Умножение десятичных дробей Тематические работы в форме ГИА (ЕГЭ)
Тематические работы в форме ГИА (ЕГЭ) По следам теоремы Пифагора
По следам теоремы Пифагора Статистика знает всё
Статистика знает всё Предел числовой последовательности
Предел числовой последовательности Тригонометрические функции
Тригонометрические функции Презентация на тему Умножение десятичных дробей (5 класс)
Презентация на тему Умножение десятичных дробей (5 класс)  Презентация на тему СОСТАВ ЧИСЕЛ ПЕРВОГО ДЕСЯТКА
Презентация на тему СОСТАВ ЧИСЕЛ ПЕРВОГО ДЕСЯТКА  Умножение круглых чисел
Умножение круглых чисел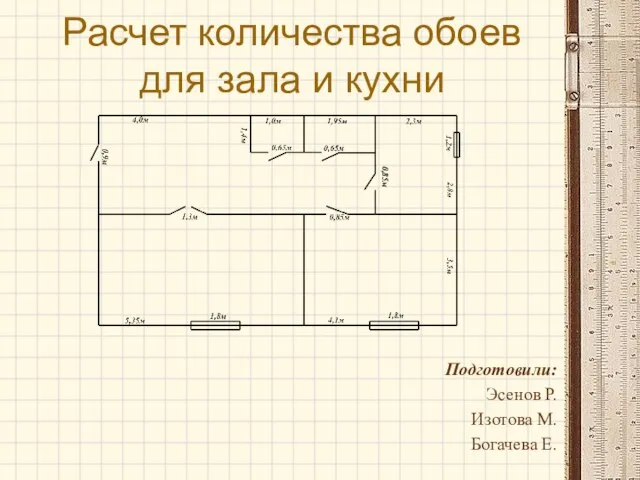 Расчет количества обоев для зала и кухни
Расчет количества обоев для зала и кухни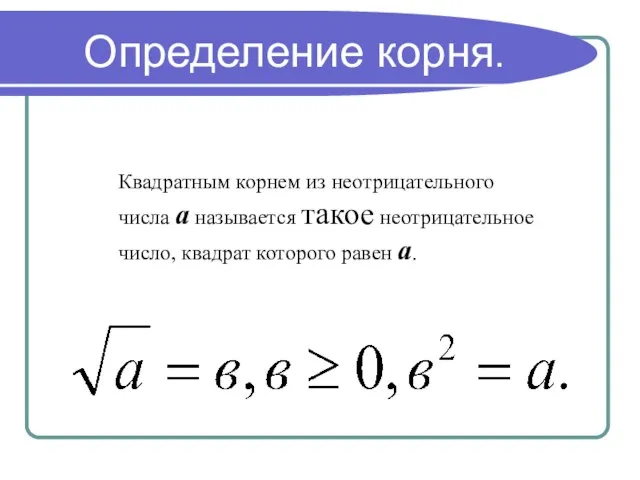 Определение корня
Определение корня Цветочный город
Цветочный город Тест по теме Треугольники и четырехугольники
Тест по теме Треугольники и четырехугольники Презентация на тему Решение логарифмических уравнений
Презентация на тему Решение логарифмических уравнений  Логика. Задания
Логика. Задания Решение иррациональных уравнений
Решение иррациональных уравнений Презентация на тему Математика вокруг нас. Узоры и орнаменты на посуде
Презентация на тему Математика вокруг нас. Узоры и орнаменты на посуде  Занимательная математика
Занимательная математика Координаты вектора
Координаты вектора Аттестационная работа. Решение сложных задач по математике
Аттестационная работа. Решение сложных задач по математике Презентация на тему Понятие площади фигуры и ее измерение
Презентация на тему Понятие площади фигуры и ее измерение  Вопросы для повторения по информатике и математике
Вопросы для повторения по информатике и математике Что называется обыкновенной дробью?
Что называется обыкновенной дробью?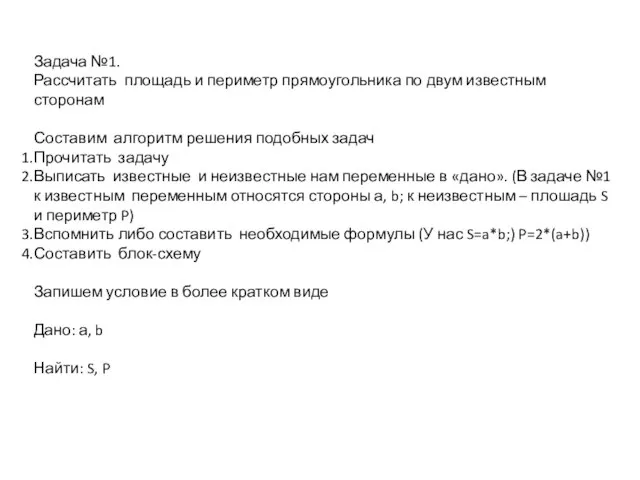 Рассчитать площадь и периметр прямоугольника по двум известным сторонам. Алгоритм решения подобных задач
Рассчитать площадь и периметр прямоугольника по двум известным сторонам. Алгоритм решения подобных задач Последовательности и прогрессии (ПР №25)
Последовательности и прогрессии (ПР №25) Практикумы по задачам на готовых чертежах
Практикумы по задачам на готовых чертежах