- Лекция №3

Содержание
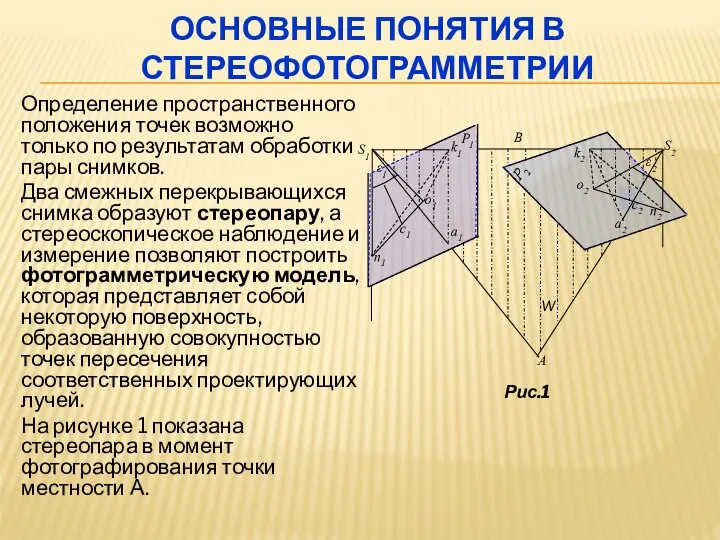
- 2. ОСНОВНЫЕ ПОНЯТИЯ В СТЕРЕОФОТОГРАММЕТРИИ Определение пространственного положения точек возможно только по результатам обработки пары снимков. Два
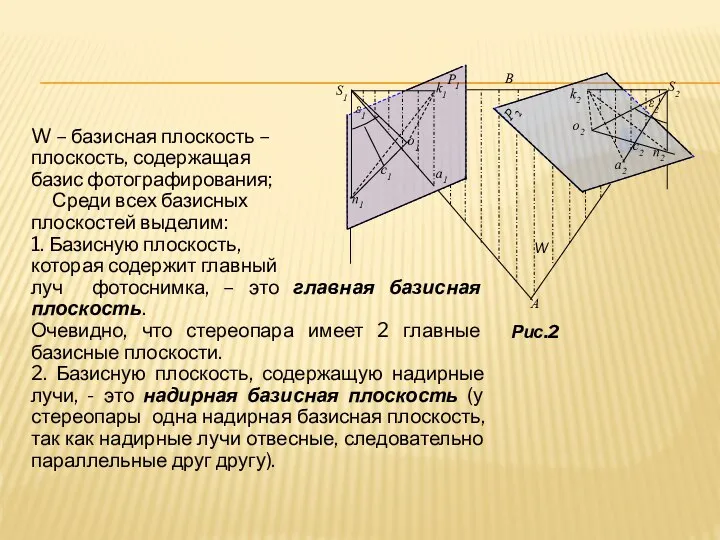
- 3. W – базисная плоскость – плоскость, содержащая базис фотографирования; Среди всех базисных плоскостей выделим: 1. Базисную
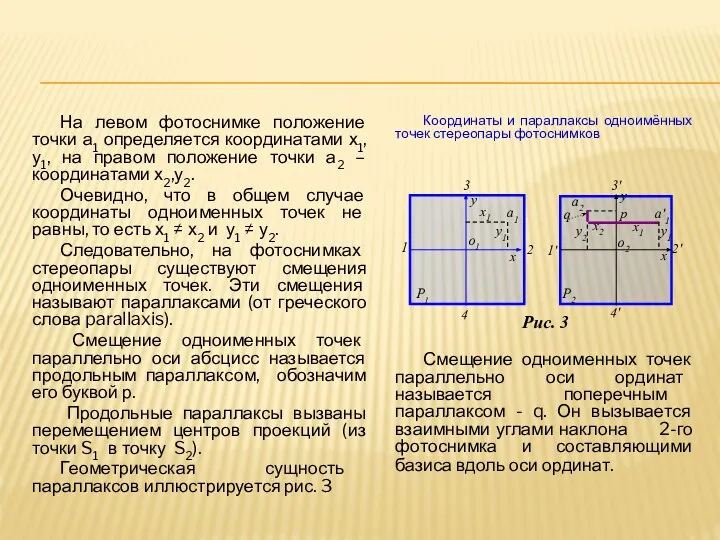
- 4. На левом фотоснимке положение точки а1 определяется координатами х1,у1, на правом положение точки а2 – координатами
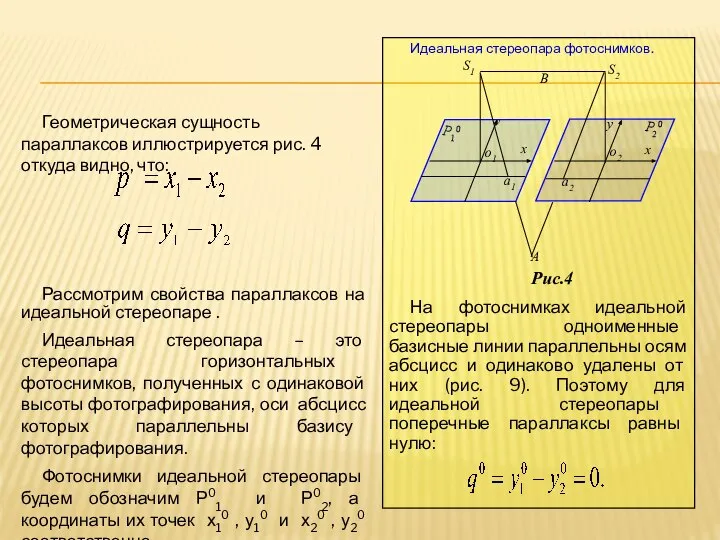
- 5. Геометрическая сущность параллаксов иллюстрируется рис. 4 откуда видно, что: Рассмотрим свойства параллаксов на идеальной стереопаре .
- 6. ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СТЕРЕОПАРЫ ФОТОСНИМКОВ Различают элементы внутреннего ориентировании (ЭВнО) и элементы внешнего ориентирования (ЭВО) фотоснимков. ЭВнО
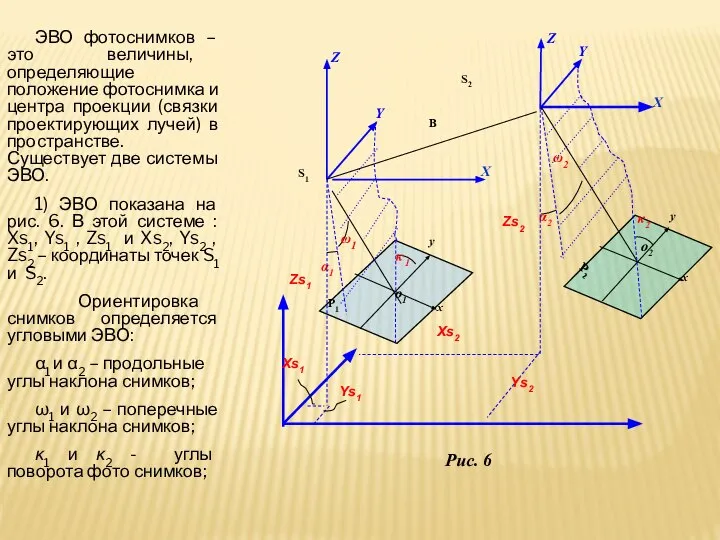
- 7. ЭВО фотоснимков – это величины, определяющие положение фотоснимка и центра проекции (связки проектирующих лучей) в пространстве.
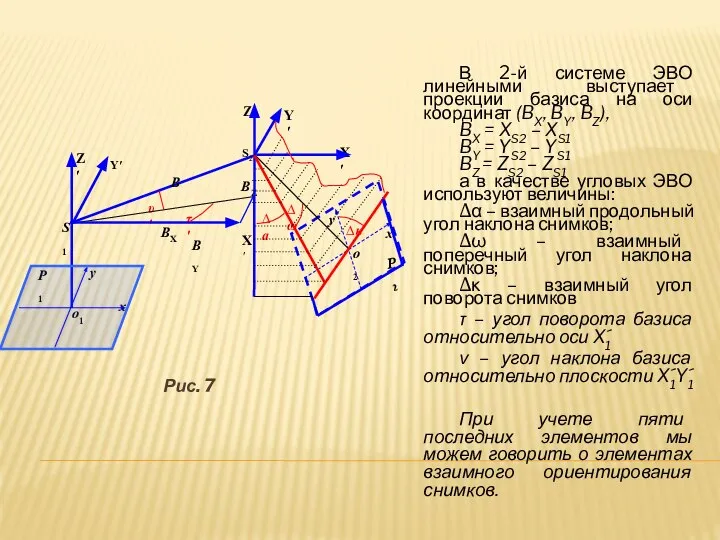
- 8. Рис. 7 В 2-й системе ЭВО линейными выступает проекции базиса на оси координат (BX, BY, BZ),
- 9. Таким образом, положение стереопары фотоснимков однозначно определяется пятнадцатью ЭО фотоснимков, которые составляют полную группу элементов ориентирования.
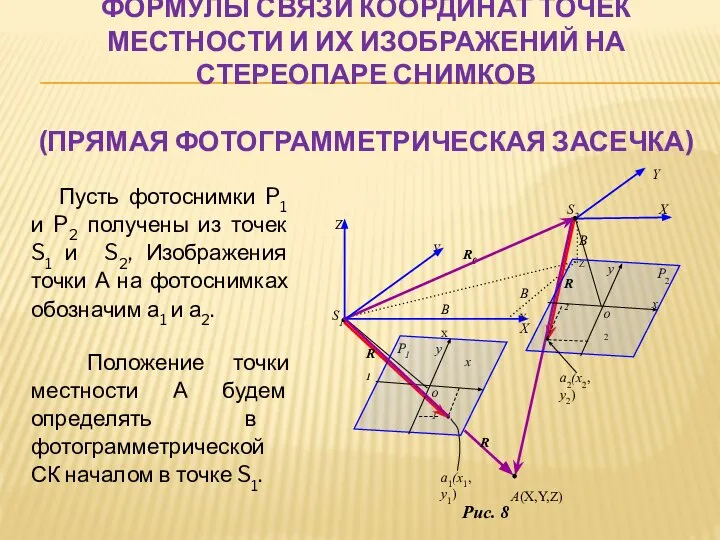
- 10. ФОРМУЛЫ СВЯЗИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И ИХ ИЗОБРАЖЕНИЙ НА СТЕРЕОПАРЕ СНИМКОВ (ПРЯМАЯ ФОТОГРАММЕТРИЧЕСКАЯ ЗАСЕЧКА) Пусть фотоснимки
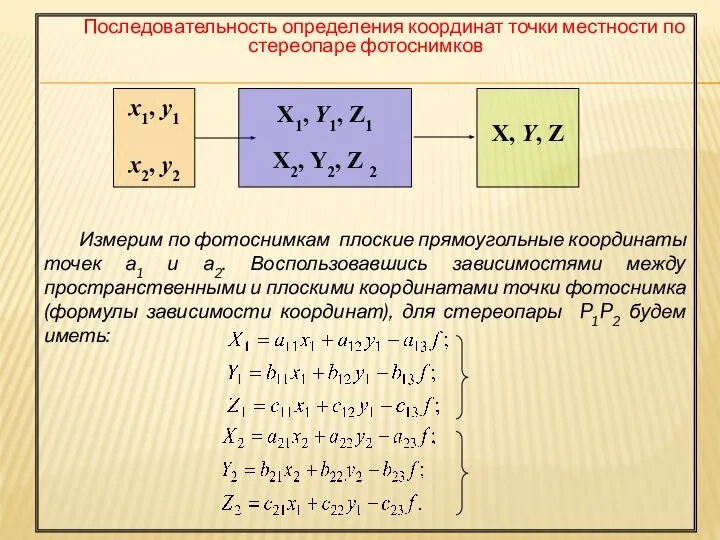
- 11. Последовательность определения координат точки местности по стереопаре фотоснимков Измерим по фотоснимкам плоские прямоугольные координаты точек а1
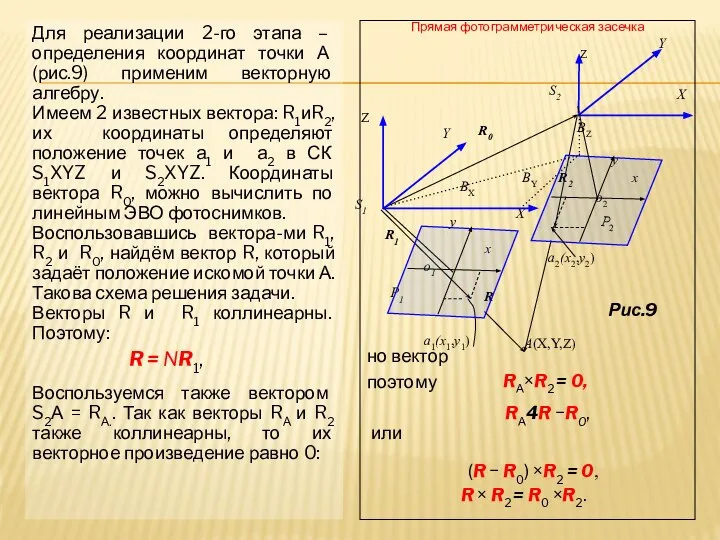
- 12. Для реализации 2-го этапа – определения координат точки А (рис.9) применим векторную алгебру. Имеем 2 известных
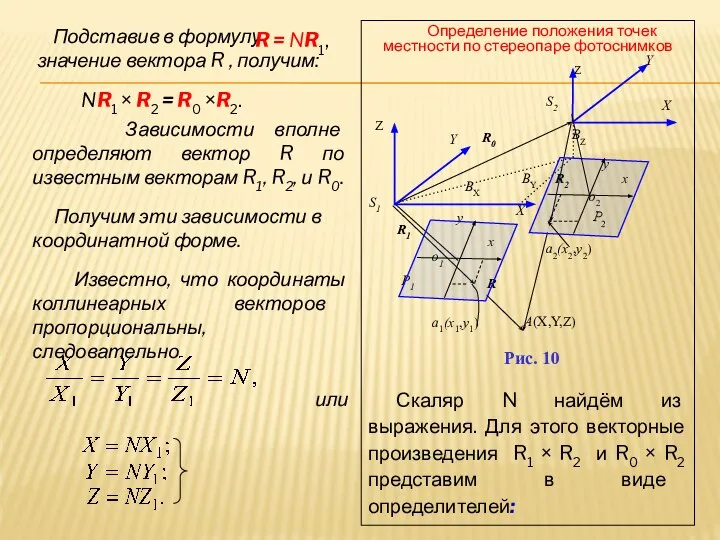
- 13. Подставив в формулу значение вектора R , получим: Зависимости вполне определяют вектор R по известным векторам
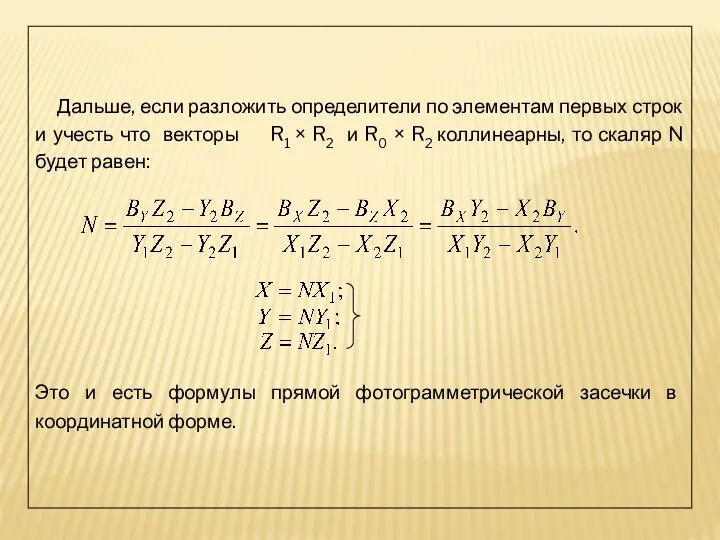
- 14. Дальше, если разложить определители по элементам первых строк и учесть что векторы R1 × R2 и
- 15. Из этих зависимостей следует, что по стереопаре можно определить не только плановые координаты, но и высоту
- 16. Зависимости между координатами точки местности и координатами её изображений на стереопаре фотоснимков описывают прямую фотограмметрическую засечку.
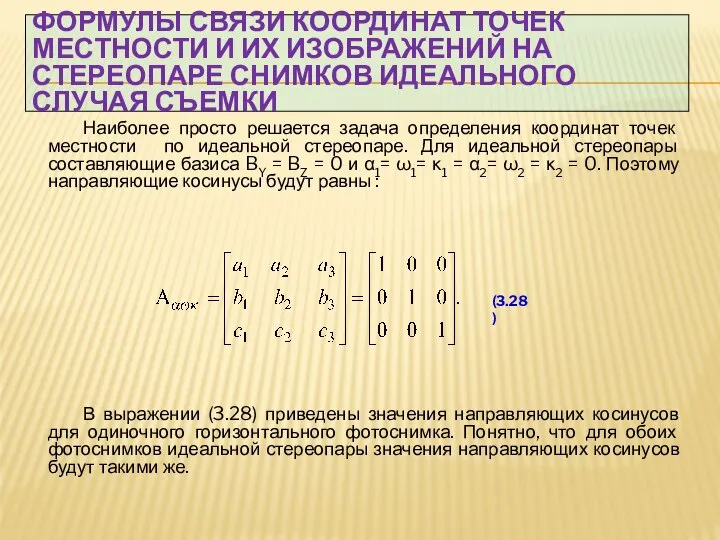
- 17. ФОРМУЛЫ СВЯЗИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И ИХ ИЗОБРАЖЕНИЙ НА СТЕРЕОПАРЕ СНИМКОВ ИДЕАЛЬНОГО СЛУЧАЯ СЪЕМКИ Наиболее просто
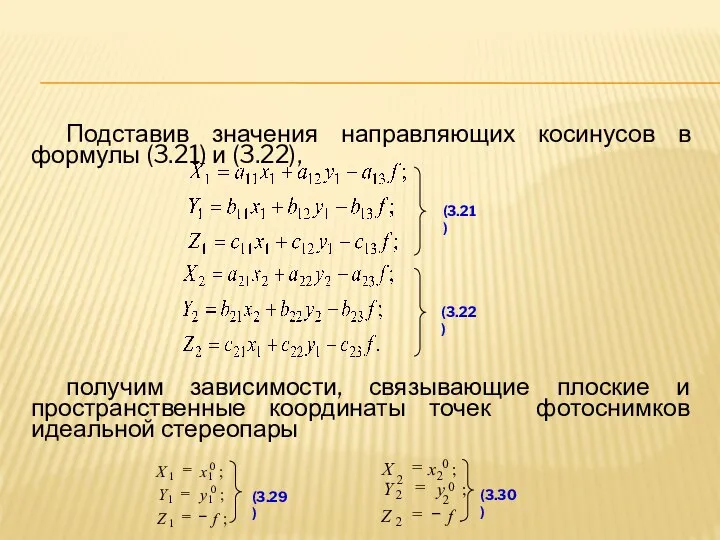
- 18. Подставив значения направляющих косинусов в формулы (3.21) и (3.22), получим зависимости, связывающие плоские и пространственные координаты
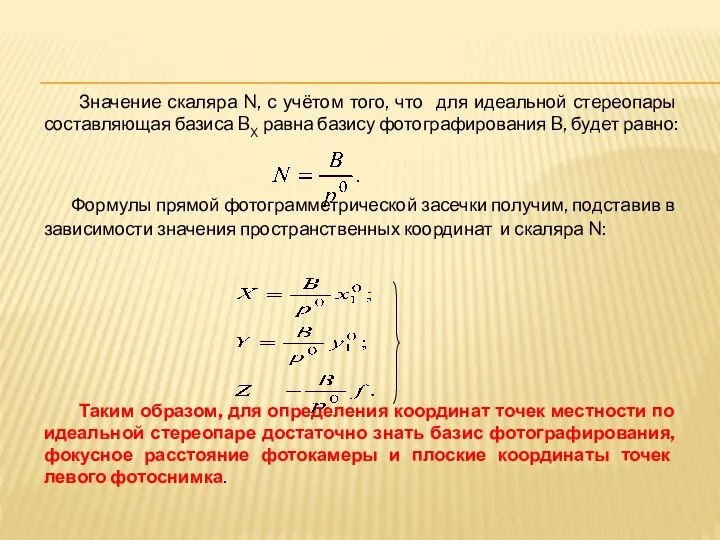
- 19. Значение скаляра N, с учётом того, что для идеальной стереопары составляющая базиса BX равна базису фотографирования
- 20. Заключение Формулы прямой фотограмметрической засечки свидетельствуют о том, что стереопара в отличие от одиночного фотоснимка позволяет
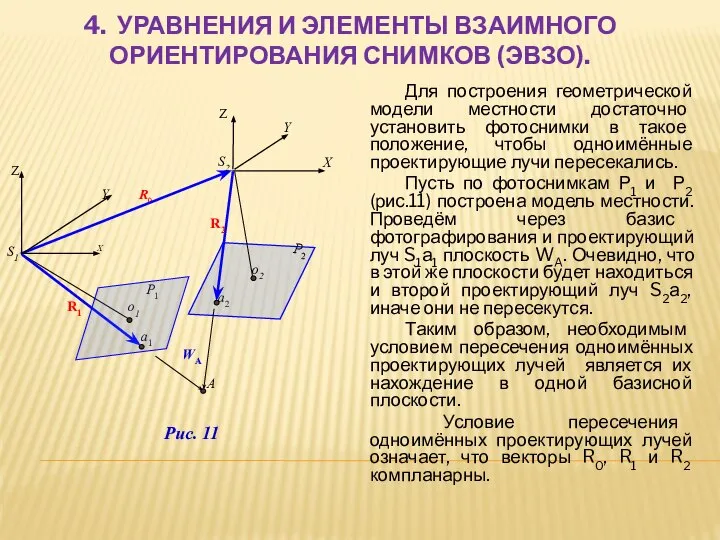
- 21. 4. УРАВНЕНИЯ И ЭЛЕМЕНТЫ ВЗАИМНОГО ОРИЕНТИРОВАНИЯ СНИМКОВ (ЭВЗО). Для построения геометрической модели местности достаточно установить фотоснимки
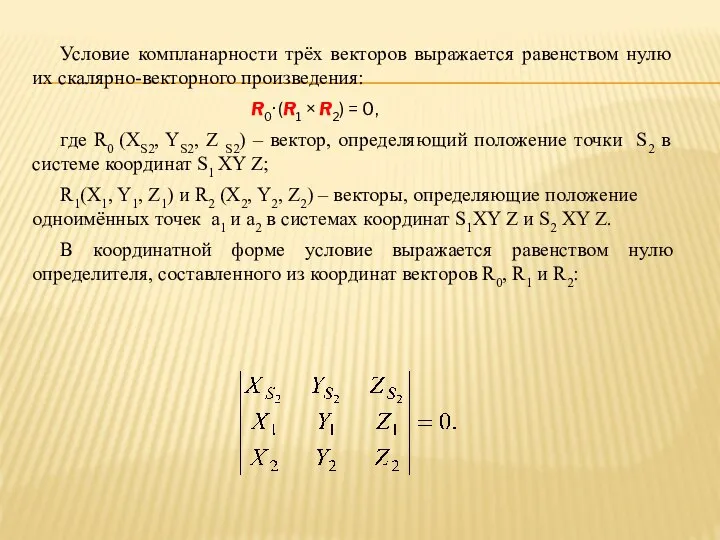
- 22. Условие компланарности трёх векторов выражается равенством нулю их скалярно-векторного произведения: где R0 (XS2, YS2, Z S2)
- 23. Следовательно, условие пересечения одноимённых проектирующих лучей связывает между собой только направления проектирующих лучей с направлением базиса.
- 24. Под взаимным ориентированием будем подразумевать установку фотоснимков стереопары в такое положение, при котором каждая пара одноимённых
- 25. Взаимное же положение фотоснимков, как в 1-м, так и во 2-м случаях характеризуется разностями их ЭВО:
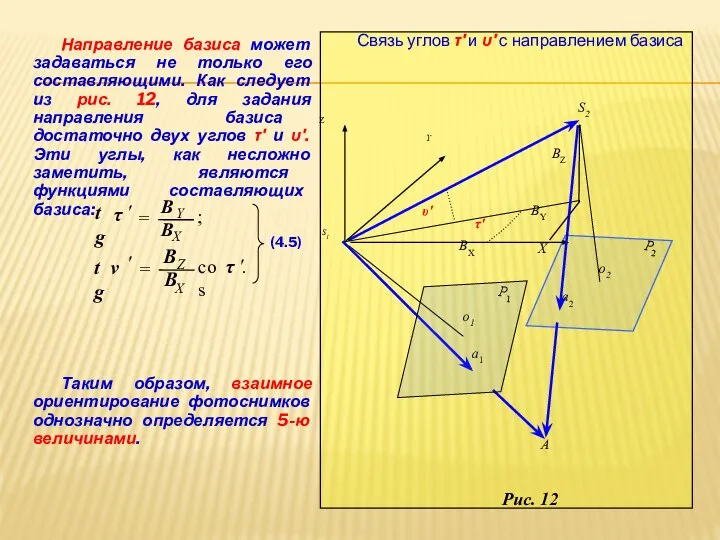
- 26. Направление базиса может задаваться не только его составляющими. Как следует из рис. 12, для задания направления
- 27. Величины, определяющие взаимное положение фотоснимков стереопары, при котором каждая пара одноимённых проектирующих лучей пересекается, называются элементами
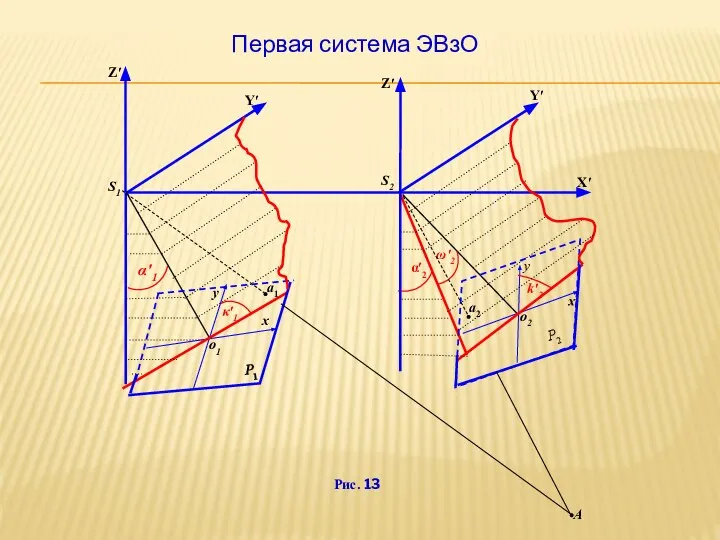
- 28. Первая система ЭВзО
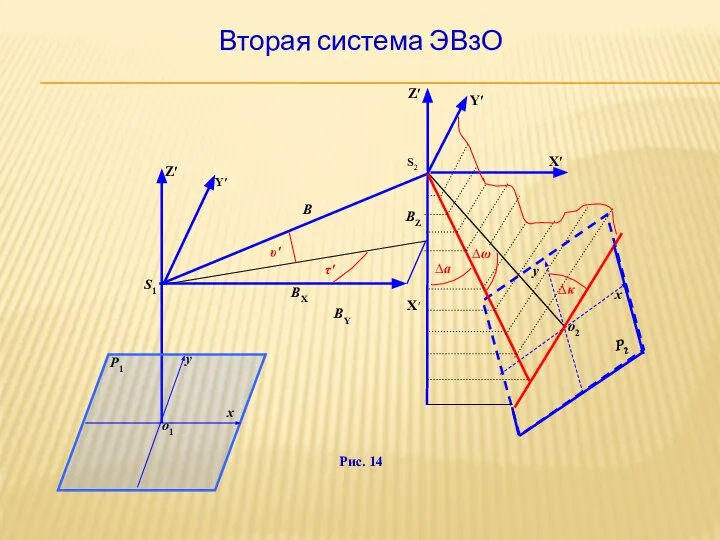
- 29. 2-я группа ЭВзО определяется относительно СК с началом в точке S1, а оси X′ и Y′
- 30. Вторая система ЭВзО Рис. 14
- 31. Для определения ЭВзО необходимо знать их связи с теми величинами, которые можно измерить по фотоснимкам. ЭВзО
- 32. Зависимости, связывающие ЭВзО с координатами одноимённых точек фотоснимков стереопары, принято называть уравнениями взаимного ориентирования. Вид уравнения
- 33. 1. Уравнения взаимного ориентирования фотоснимков 1-м способом а) Строгое уравнение ВзО Для ЭВзО первой системы XВ
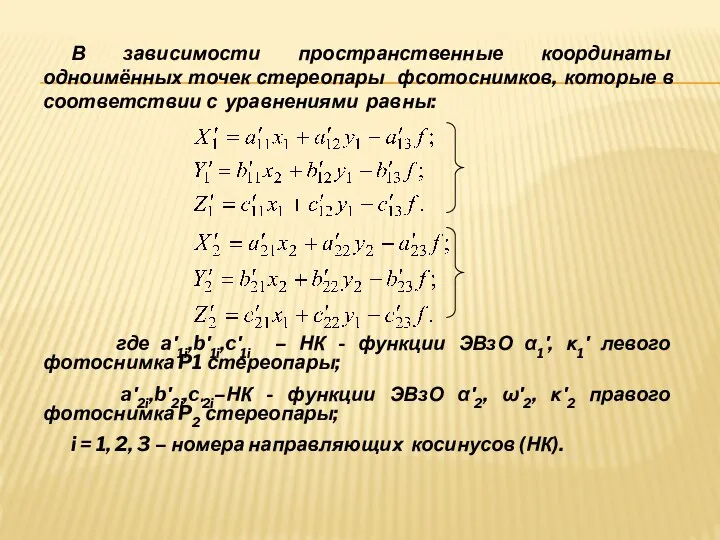
- 34. В зависимости пространственные координаты одноимённых точек стереопары фсотоснимков, которые в соответствии с уравнениями равны: где a′1i,b′1i,c′1i
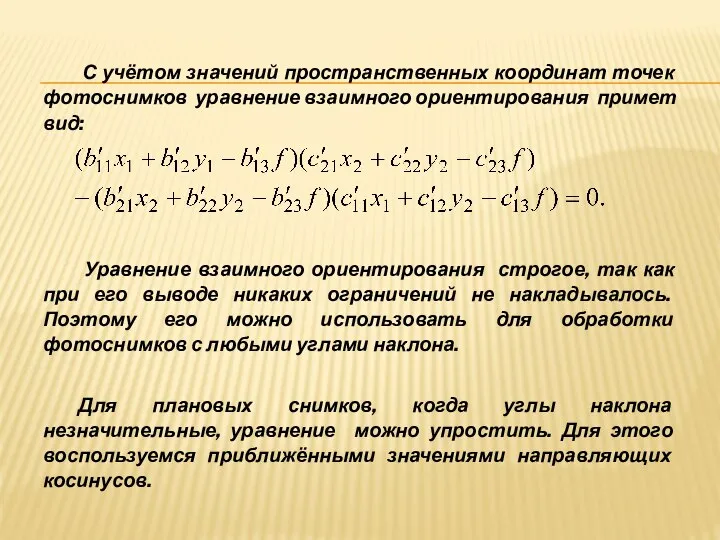
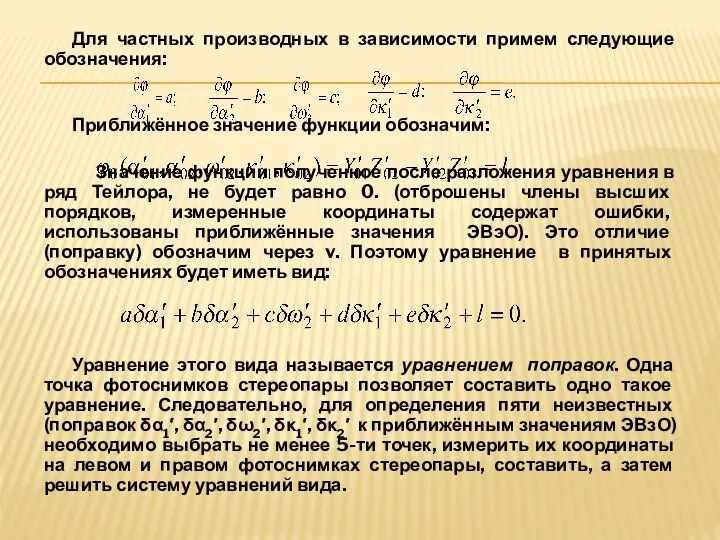
- 35. С учётом значений пространственных координат точек фотоснимков уравнение взаимного ориентирования примет вид: Уравнение взаимного ориентирования строгое,
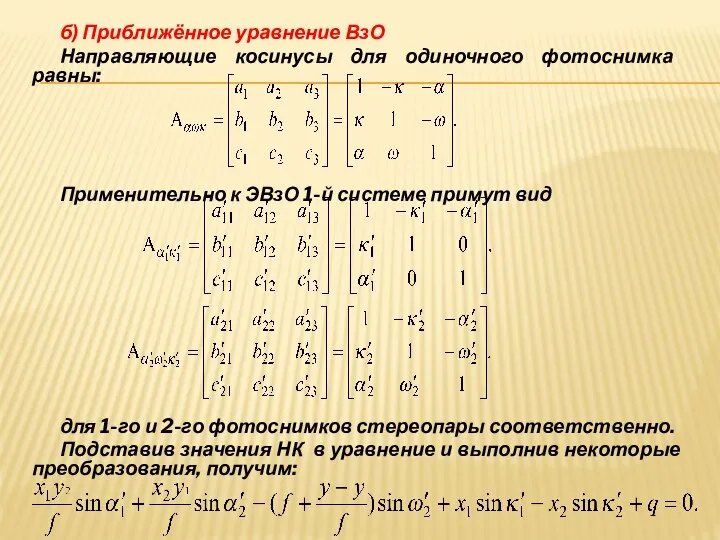
- 36. б) Приближённое уравнение ВзО Направляющие косинусы для одиночного фотоснимка равны: Применительно к ЭВзО 1-й системе примут
- 37. В уравнениях ЭВзО связаны с координатами одноимённых точек и ЭВнО фотоснимков. Так как ЭВнО, как правило,
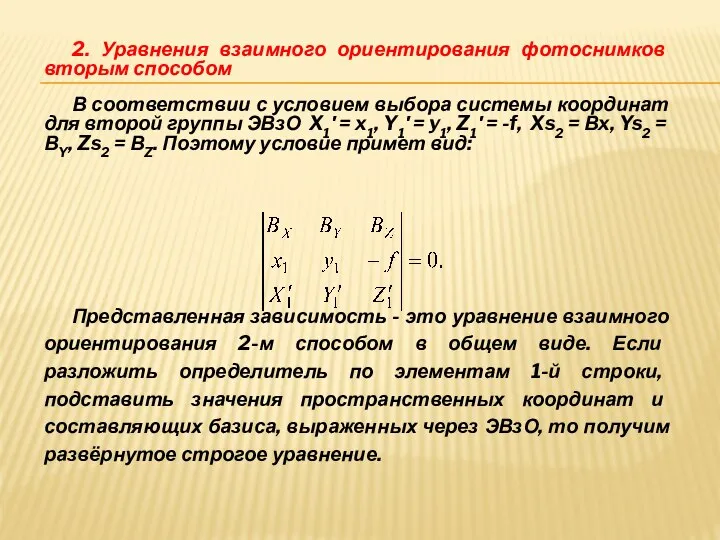
- 38. 2. Уравнения взаимного ориентирования фотоснимков вторым способом В соответствии с условием выбора системы координат для второй
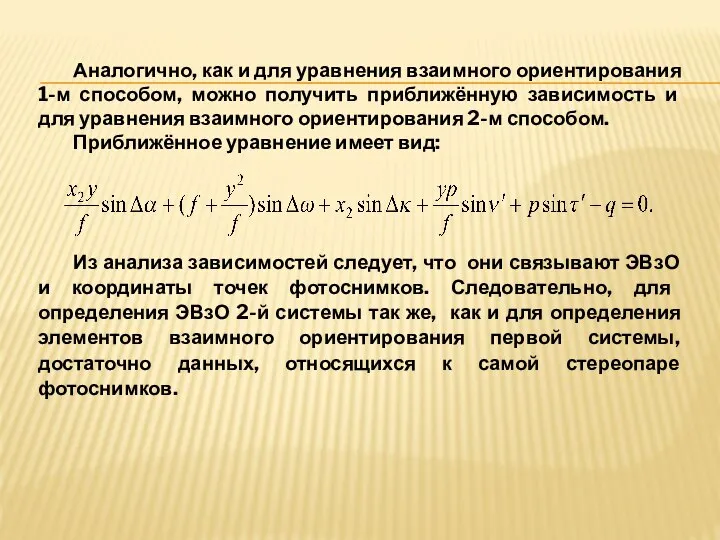
- 39. Аналогично, как и для уравнения взаимного ориентирования 1-м способом, можно получить приближённую зависимость и для уравнения
- 40. Таким образом, вся необходимая информация для построения модели местности по стереопаре фотоснимков, содержится в самой стереопаре.
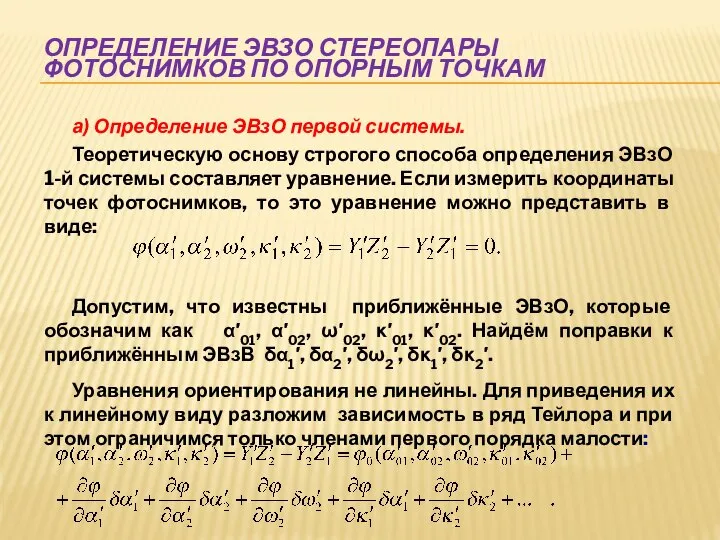
- 41. ОПРЕДЕЛЕНИЕ ЭВЗО СТЕРЕОПАРЫ ФОТОСНИМКОВ ПО ОПОРНЫМ ТОЧКАМ а) Определение ЭВзО первой системы. Теоретическую основу строгого способа
- 42. Для частных производных в зависимости примем следующие обозначения: Приближённое значение функции обозначим: Значение функции полученное после
- 43. а′1i,b′1i,с′1i – НК, вычисленные по ЭВзО α′1 и κ′1 левого фотоснимка стереопары; а′2i,b′2i,с′2i – НК, вычисленные
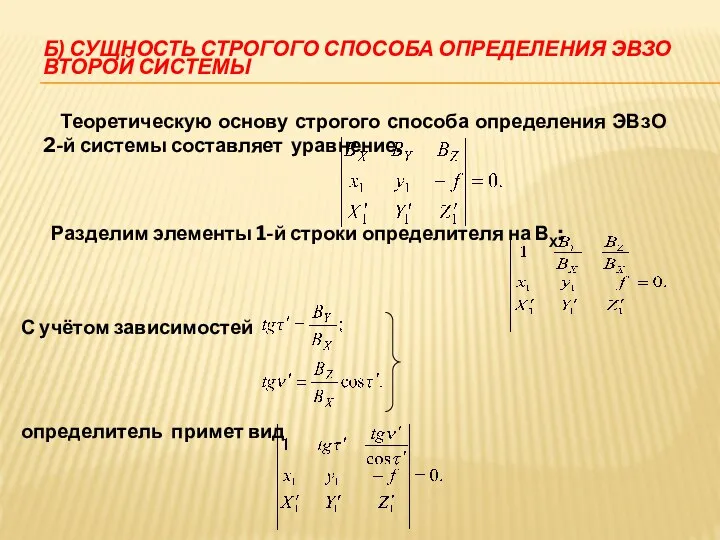
- 44. Б) СУЩНОСТЬ СТРОГОГО СПОСОБА ОПРЕДЕЛЕНИЯ ЭВЗО ВТОРОЙ СИСТЕМЫ Теоретическую основу строгого способа определения ЭВзО 2-й системы
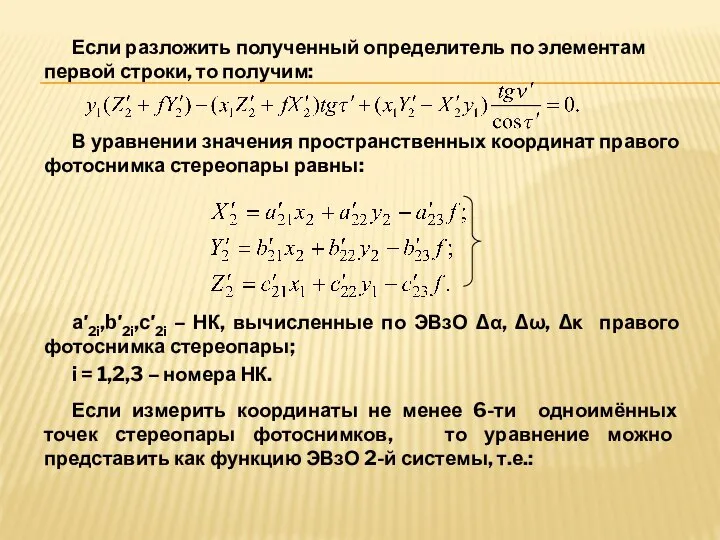
- 45. Если разложить полученный определитель по элементам первой строки, то получим: В уравнении значения пространственных координат правого
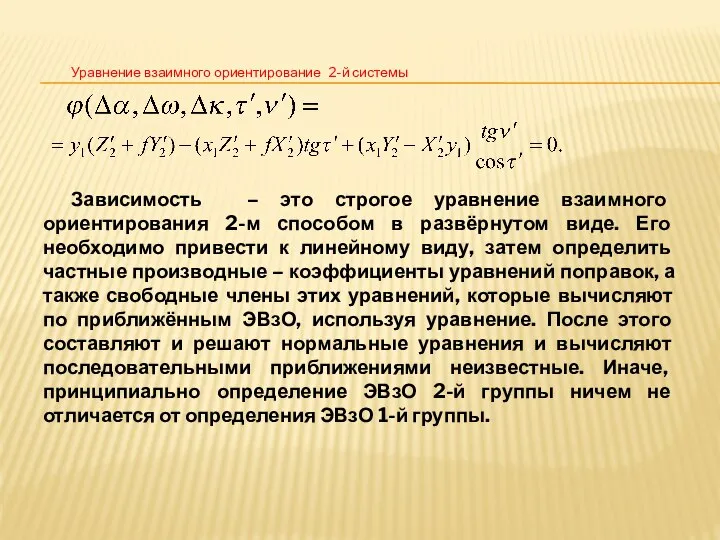
- 46. Уравнение взаимного ориентирование 2-й системы Зависимость – это строгое уравнение взаимного ориентирования 2-м способом в развёрнутом
- 48. Скачать презентацию
Слайд 2ОСНОВНЫЕ ПОНЯТИЯ В СТЕРЕОФОТОГРАММЕТРИИ
Определение пространственного положения точек возможно только по результатам обработки
ОСНОВНЫЕ ПОНЯТИЯ В СТЕРЕОФОТОГРАММЕТРИИ
Определение пространственного положения точек возможно только по результатам обработки
Слайд 3W – базисная плоскость –
плоскость, содержащая
базис фотографирования;
Среди всех базисных
W – базисная плоскость –
плоскость, содержащая
базис фотографирования;
Среди всех базисных
Слайд 4На левом фотоснимке положение точки а1 определяется координатами х1,у1, на правом положение
На левом фотоснимке положение точки а1 определяется координатами х1,у1, на правом положение
Слайд 5Геометрическая сущность параллаксов иллюстрируется рис. 4 откуда видно, что:
Рассмотрим свойства параллаксов на
Геометрическая сущность параллаксов иллюстрируется рис. 4 откуда видно, что:
Рассмотрим свойства параллаксов на
Слайд 6ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СТЕРЕОПАРЫ ФОТОСНИМКОВ
Различают элементы внутреннего ориентировании (ЭВнО) и элементы внешнего ориентирования
ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ СТЕРЕОПАРЫ ФОТОСНИМКОВ
Различают элементы внутреннего ориентировании (ЭВнО) и элементы внешнего ориентирования
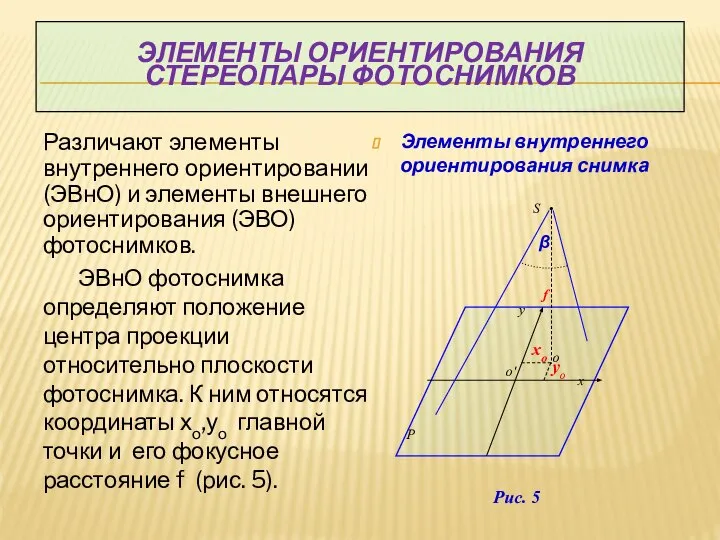
Слайд 7ЭВО фотоснимков – это величины, определяющие положение фотоснимка и центра проекции (связки
ЭВО фотоснимков – это величины, определяющие положение фотоснимка и центра проекции (связки
Слайд 8Рис. 7
В 2-й системе ЭВО линейными выступает проекции базиса на оси координат
Рис. 7
В 2-й системе ЭВО линейными выступает проекции базиса на оси координат
Слайд 9Таким образом, положение стереопары фотоснимков однозначно определяется пятнадцатью ЭО фотоснимков, которые составляют
Таким образом, положение стереопары фотоснимков однозначно определяется пятнадцатью ЭО фотоснимков, которые составляют
Слайд 10ФОРМУЛЫ СВЯЗИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И ИХ ИЗОБРАЖЕНИЙ НА СТЕРЕОПАРЕ СНИМКОВ
(ПРЯМАЯ
ФОРМУЛЫ СВЯЗИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И ИХ ИЗОБРАЖЕНИЙ НА СТЕРЕОПАРЕ СНИМКОВ (ПРЯМАЯ
Слайд 11Последовательность определения координат точки местности по стереопаре фотоснимков
Измерим по фотоснимкам плоские прямоугольные
Последовательность определения координат точки местности по стереопаре фотоснимков
Измерим по фотоснимкам плоские прямоугольные
Слайд 12Для реализации 2-го этапа – определения координат точки А (рис.9) применим векторную
Для реализации 2-го этапа – определения координат точки А (рис.9) применим векторную
Слайд 13 Подставив в формулу
значение вектора R , получим:
Зависимости вполне определяют
Подставив в формулу
значение вектора R , получим:
Зависимости вполне определяют
Слайд 14
Дальше, если разложить определители по элементам первых строк и учесть что
Дальше, если разложить определители по элементам первых строк и учесть что
Слайд 15Из этих зависимостей следует, что по стереопаре можно определить не только плановые
Из этих зависимостей следует, что по стереопаре можно определить не только плановые
Слайд 16Зависимости между координатами точки местности и координатами её изображений на стереопаре фотоснимков
Зависимости между координатами точки местности и координатами её изображений на стереопаре фотоснимков
Слайд 17ФОРМУЛЫ СВЯЗИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И ИХ ИЗОБРАЖЕНИЙ НА СТЕРЕОПАРЕ СНИМКОВ ИДЕАЛЬНОГО
ФОРМУЛЫ СВЯЗИ КООРДИНАТ ТОЧЕК МЕСТНОСТИ И ИХ ИЗОБРАЖЕНИЙ НА СТЕРЕОПАРЕ СНИМКОВ ИДЕАЛЬНОГО
Слайд 18Подставив значения направляющих косинусов в формулы (3.21) и (3.22),
получим зависимости, связывающие
Подставив значения направляющих косинусов в формулы (3.21) и (3.22),
получим зависимости, связывающие
Слайд 19Значение скаляра N, с учётом того, что для идеальной стереопары составляющая базиса
Значение скаляра N, с учётом того, что для идеальной стереопары составляющая базиса
Слайд 20Заключение
Формулы прямой фотограмметрической засечки свидетельствуют о том, что стереопара в отличие от
Заключение
Формулы прямой фотограмметрической засечки свидетельствуют о том, что стереопара в отличие от
Слайд 214. УРАВНЕНИЯ И ЭЛЕМЕНТЫ ВЗАИМНОГО ОРИЕНТИРОВАНИЯ СНИМКОВ (ЭВЗО).
Для построения геометрической модели местности
4. УРАВНЕНИЯ И ЭЛЕМЕНТЫ ВЗАИМНОГО ОРИЕНТИРОВАНИЯ СНИМКОВ (ЭВЗО).
Для построения геометрической модели местности
Слайд 22Условие компланарности трёх векторов выражается равенством нулю их скалярно-векторного произведения:
где R0 (XS2,
Условие компланарности трёх векторов выражается равенством нулю их скалярно-векторного произведения:
где R0 (XS2,
Слайд 23Следовательно, условие пересечения одноимённых проектирующих лучей связывает между собой только направления проектирующих
Следовательно, условие пересечения одноимённых проектирующих лучей связывает между собой только направления проектирующих
Слайд 24Под взаимным ориентированием будем подразумевать установку фотоснимков стереопары в такое положение, при
Под взаимным ориентированием будем подразумевать установку фотоснимков стереопары в такое положение, при
Слайд 25Взаимное же положение фотоснимков, как в 1-м, так и во 2-м случаях
Взаимное же положение фотоснимков, как в 1-м, так и во 2-м случаях
Слайд 26Направление базиса может задаваться не только его составляющими. Как следует из рис.
Направление базиса может задаваться не только его составляющими. Как следует из рис.
Слайд 27Величины, определяющие взаимное положение фотоснимков стереопары, при котором каждая пара одноимённых проектирующих
Величины, определяющие взаимное положение фотоснимков стереопары, при котором каждая пара одноимённых проектирующих
Слайд 28Первая система ЭВзО
Первая система ЭВзО
Слайд 29 2-я группа ЭВзО определяется относительно СК с началом в точке S1,
2-я группа ЭВзО определяется относительно СК с началом в точке S1,
Слайд 30Вторая система ЭВзО
Рис. 14
Вторая система ЭВзО
Рис. 14
Слайд 31Для определения ЭВзО необходимо знать их связи с теми величинами, которые можно
Для определения ЭВзО необходимо знать их связи с теми величинами, которые можно
Слайд 32Зависимости, связывающие ЭВзО с координатами одноимённых точек фотоснимков стереопары, принято называть уравнениями
Зависимости, связывающие ЭВзО с координатами одноимённых точек фотоснимков стереопары, принято называть уравнениями
Слайд 331. Уравнения взаимного ориентирования фотоснимков 1-м способом
а) Строгое уравнение ВзО
Для
1. Уравнения взаимного ориентирования фотоснимков 1-м способом
а) Строгое уравнение ВзО
Для
Слайд 34В зависимости пространственные координаты одноимённых точек стереопары фсотоснимков, которые в соответствии с
В зависимости пространственные координаты одноимённых точек стереопары фсотоснимков, которые в соответствии с
Слайд 35
С учётом значений пространственных координат точек фотоснимков уравнение взаимного ориентирования примет
С учётом значений пространственных координат точек фотоснимков уравнение взаимного ориентирования примет
Слайд 36б) Приближённое уравнение ВзО
Направляющие косинусы для одиночного фотоснимка равны:
Применительно к ЭВзО
б) Приближённое уравнение ВзО
Направляющие косинусы для одиночного фотоснимка равны:
Применительно к ЭВзО
Слайд 37В уравнениях ЭВзО связаны с координатами одноимённых точек и ЭВнО фотоснимков. Так
Слайд 382. Уравнения взаимного ориентирования фотоснимков вторым способом
В соответствии с условием выбора
2. Уравнения взаимного ориентирования фотоснимков вторым способом
В соответствии с условием выбора
Слайд 39Аналогично, как и для уравнения взаимного ориентирования 1-м способом, можно получить приближённую
Аналогично, как и для уравнения взаимного ориентирования 1-м способом, можно получить приближённую
Слайд 40Таким образом, вся необходимая информация для построения модели местности по стереопаре фотоснимков,
Таким образом, вся необходимая информация для построения модели местности по стереопаре фотоснимков,
Слайд 41
ОПРЕДЕЛЕНИЕ ЭВЗО СТЕРЕОПАРЫ ФОТОСНИМКОВ ПО ОПОРНЫМ ТОЧКАМ
а) Определение ЭВзО первой системы.
ОПРЕДЕЛЕНИЕ ЭВЗО СТЕРЕОПАРЫ ФОТОСНИМКОВ ПО ОПОРНЫМ ТОЧКАМ
а) Определение ЭВзО первой системы.
Слайд 42Для частных производных в зависимости примем следующие обозначения:
Приближённое значение функции обозначим:
Для частных производных в зависимости примем следующие обозначения:
Приближённое значение функции обозначим:
Слайд 43а′1i,b′1i,с′1i – НК, вычисленные по ЭВзО α′1 и κ′1 левого фотоснимка стереопары;
а′2i,b′2i,с′2i
а′1i,b′1i,с′1i – НК, вычисленные по ЭВзО α′1 и κ′1 левого фотоснимка стереопары;
а′2i,b′2i,с′2i
Слайд 44
Б) СУЩНОСТЬ СТРОГОГО СПОСОБА ОПРЕДЕЛЕНИЯ ЭВЗО ВТОРОЙ СИСТЕМЫ
Теоретическую основу строгого
Б) СУЩНОСТЬ СТРОГОГО СПОСОБА ОПРЕДЕЛЕНИЯ ЭВЗО ВТОРОЙ СИСТЕМЫ
Теоретическую основу строгого
Слайд 45Если разложить полученный определитель по элементам первой строки, то получим:
В уравнении значения
Если разложить полученный определитель по элементам первой строки, то получим:
В уравнении значения
Слайд 46Уравнение взаимного ориентирование 2-й системы
Зависимость – это строгое уравнение взаимного ориентирования 2-м
Уравнение взаимного ориентирование 2-й системы
Зависимость – это строгое уравнение взаимного ориентирования 2-м
 Подготовка к ПА. Математика
Подготовка к ПА. Математика النشاط الثالث
النشاط الثالث Умножаем на 4
Умножаем на 4 Признак перпендикулярности прямой и плоскости
Признак перпендикулярности прямой и плоскости Свойства степени с натуральным показателем
Свойства степени с натуральным показателем Согласные звуки [в],[ в’], буквы В, в
Согласные звуки [в],[ в’], буквы В, в Построение графика функции с помощью производной
Построение графика функции с помощью производной Многогранники. Вершины, рёбра, грани многогранника. Развертка. Многогранные углы. Выпуклые многогранники. Теорема Эйлера
Многогранники. Вершины, рёбра, грани многогранника. Развертка. Многогранные углы. Выпуклые многогранники. Теорема Эйлера Примеры расчета матриц
Примеры расчета матриц Занимательная математика
Занимательная математика Презентация на тему Километр (3 класс)
Презентация на тему Километр (3 класс)  Формула Пика
Формула Пика Величины. Длина
Величины. Длина Умножение десятичной дроби на натуральное число. Графический диктант
Умножение десятичной дроби на натуральное число. Графический диктант Логарифмические уравнения
Логарифмические уравнения Презентация на тему Иррациональные числа (8 класс)
Презентация на тему Иррациональные числа (8 класс)  Тест по теме: Объем наклонной призмы, пирамиды и конуса. Вариант 2
Тест по теме: Объем наклонной призмы, пирамиды и конуса. Вариант 2 Площадь параллелограмма
Площадь параллелограмма Вычисление неопределенных интегралов методом интегрирования по частям
Вычисление неопределенных интегралов методом интегрирования по частям Статистическая теория радиотехнических систем. Вероятностные характеристики огибающей и фазы узкополосногонормального процесса
Статистическая теория радиотехнических систем. Вероятностные характеристики огибающей и фазы узкополосногонормального процесса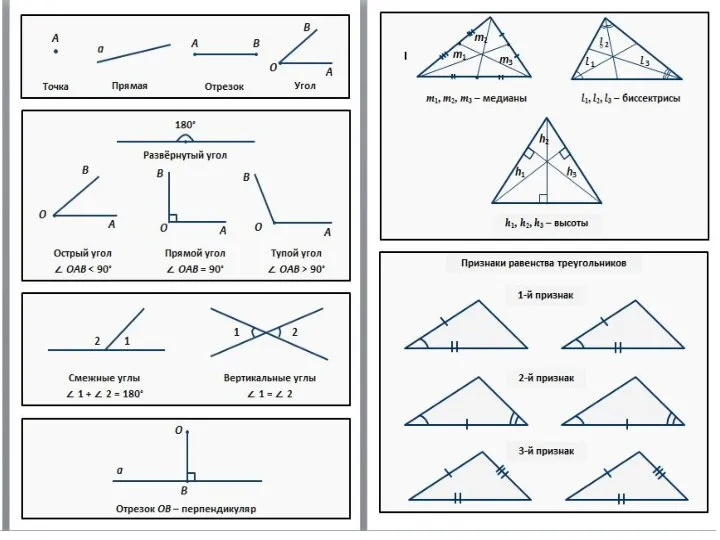 Геометрия. 8 класс
Геометрия. 8 класс Показательные уравнения, сводящиеся к квадратным
Показательные уравнения, сводящиеся к квадратным Арифметическая прогрессия
Арифметическая прогрессия Тригонометрия. Учебно-игровое пособие
Тригонометрия. Учебно-игровое пособие Обыкновенные дроби, часть 2. 5 класс
Обыкновенные дроби, часть 2. 5 класс Первый признак параллельности прямых
Первый признак параллельности прямых Логарифмы
Логарифмы Взаимно-обратные задачи. 2 класс
Взаимно-обратные задачи. 2 класс